News
Flying Transformer ‘DRAGON’ Drone Can Morph To Squeeze Into Tight Spaces
Flying Transformer ‘DRAGON’ Drone Can Morph To Squeeze Into Tight Spaces
One common application of drones is that of inspection, often in inaccessible, dangerous and complex spaces such as nuclear facilities or boiler rooms.
Drone developers have come up with various ways of tackling these hazardous environments, such as creating protective cages.
However, such drones are limited by the fact that they can only interact with their environments to the extent that they have sensors to
Now, a group of researchers at the University of Tokyo’s Department of Mechano-Informatics JSK Lab have developed another solution – and it can move and twist to suit its environment, or could even manipulate objects, say the researchers.
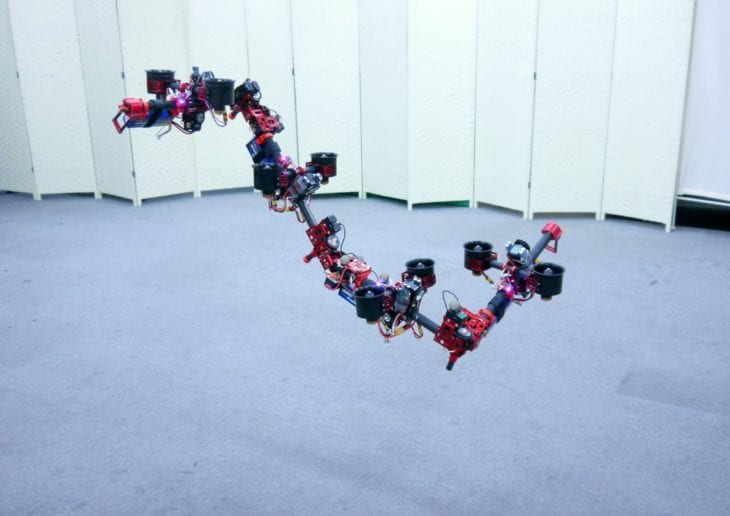
They’ve named it the ‘DRAGON’ – or if you please, a Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON – and to the eye it is indeed reminiscent of the twisting morphing form of a Chinese dragon.
It’s technical name however is a ‘multi-link aerial robot’, and when its four links are folded into a square shape, it has all the appearance of a quadcopter (though it actually has eight thrusters, two on each link’s side).

Source: JSK Lab
The team demonstrated the flying robot’s capabilities last month at ICRA2018, where the audience saw it rising into the air and morphing from one shape to another.
Hovering in mid-air, the DRAGON can transform from quadcopter mode to a snake-like shape that can fit through small gaps.
It can even decide transform into zig-zag shapes, or a spiral-like twist, and even better – it can decide for itself what shape to take to tackle a given situation.
Using a high-level Intel Euclid processor, it turns its ducted fans up or down, left or right, to thrust each link at the same time as bending the powered hinge that adjoins each link.
Although its battery at the moment only provides for three minutes of flight time, the researchers hope in the future that they will improve the DRAGON’s design, increasing the number of links and the dexterity of aerial robot.
It might even be kitted out with a two-fingered manipulator, says JSK Lab contributor Fan Shi.
It is “an ideal platform for aerial manipulation,” he told IEEE, “and I really look forward to its further applications and research.”


















