News
Drone System for Rapid Detection of Unconventional Minefields
Drone System for Rapid Detection of Unconventional Minefields
PFM-1 mines are the Soviet developed weapon that were used in the Soviet-Afghan war to block the passage to otherwise inaccessible mountain terrains. Called the “butterfly mines” since they were aerially deployed in a random fashion across terrains. It is unknown how many butterfly mines are still out there laying in Afghan passages since their detection and subsequent removal is a unique logistical challenge.
In an attempt to address the PFM-1 challenge, researchers at Binghamton University developed a protocol based on remote assessment of unique thermal signatures associated with the PFM-1 and its aluminum cassette casing in a publication titled, “Drones And “Butterflies”: A Low-Cost UAV System For Rapid Detection And Identification Of Unconventional Minefields“. In field tests, researchers were able to successfully identify and recover all elements of a randomized PFM-1 minefield.
Working
Referring to the problem of PFM-1 mines in Afghanistan as an “opportunity” to test their innovative approach, the researchers formulate their model by studying long-wave infrared (LWIR) thermal heat signature, which contrasts greatly with the LWIR signatures of the surrounding host environment and the aluminum casing of the PFM-1 dispenser.
A thermal camera (or hotspot) installed on an aerial vehicle or robot such as a drone is used to observe the thermal imagery of the ground below it. This thermal imagery can be translated into the location of land mines detected.
KSF-1 dispersal cassette and PFM-1 landmine.
Trials
DYNAMIC UAV TRIAL
In mountainous areas the size and footprint of the minefield has likely been dynamically changing over freeze-thaw cycles since the mines’ initial emplacement. For their series of field trials, the researchers dispersed the mines randomly within a 20 by 10 meters test area in a grassy field, to mimic the grassy lowlands these mines could end up in after winter melt mobilizes them.
Thermal infrared data was collected with a FLIR Vue Pro R camera, which measures LWIR in the 7.5 to 13.5 micrometers wavelength spectral band. The camera was mounted on a commercially available 3DR Solo quadcopter UAV and flown at an elevation of 10 meters above ground level for a high-resolution ground sampling distance of 1.2 centimeters.
3DR Solo quadcopter with FLIR Vue Pro R camera attached to a fixed mount.
For much accurate results, the researchers complemented thermal imaging with a visual light aerial photography flight at 10 meters altitude with a DJI Phantom 4 Pro 20 megapixel camera, which resulted in 0.24 centimeter per pixel resolution photogrammetry model orthomosaic. An orthomosaic is a georeferenced image product mosaiced from many individual photos into one single image.
Trials 1 and 2, photogrammetry of cobble environment with PFM-1 landmines circled in red and the KSF-1 cassette casing elements circled in yellow in the second image.
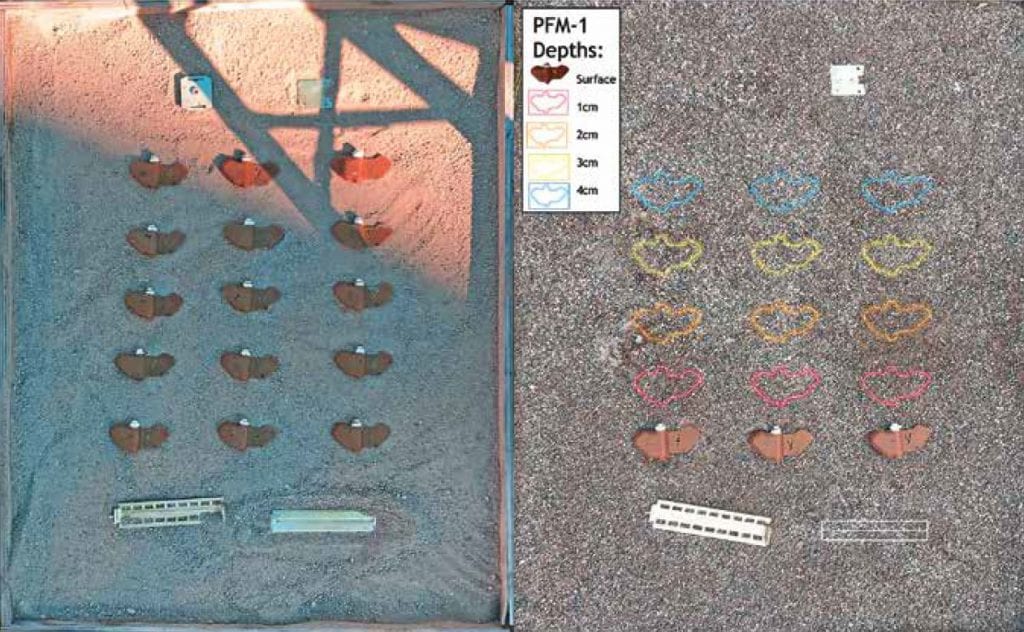
Sand environment for trials 3 and 4 with 9 PFM-1 mines and KSF-1 cassette casing elements.
STATIONARY CONTROLLED ENVIRONMENT TRIALS
Stationary controlled environment experiments were conducted in tandem with Dynamic trials to assess the impact of environmental and sediment cover on a UAV’S ability to reliably discern mines from host geology.
Over the course of 24 hours, four different experiments were conducted to test the effects of ground composition and water saturation on the detection of intact inert PFM-1 mines among host geology; the mines were left out for over one year and no noticeable deterioration of the mine occurred due to UV exposure.
In the first two experiments, five PFM-1 Mines were placed with KSF-1 casings in 0.915 by 1.07 by 0.15 meter boxes filled with cobble-sized stones to hide them from plain sight.
In the next two experiments, nine PFM-1 mines were placed in a sand-box filled with sand less than 10 millimeters. The FLIR VUE Pro R thermal infra-red camera mounted on a drone was used for collecting data. Thermal infrared imagery data was taken every 15 seconds throughout the 24-hour duration starting at 12:00 a.m. in order to capture the optimal time of day to detect the PFM-1s based on differences in the thermal inertia of the PFM-1s and surrounding environment.
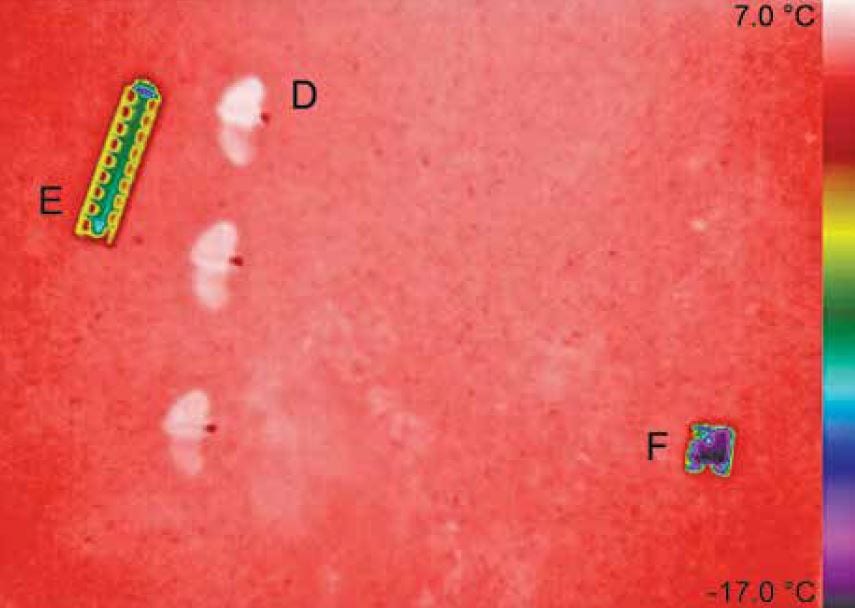
Trials 4, thermal image of PFM-1s and KSF casing in sand environment at 12:00 PM October 31st
Cumulative Results
The Dynamic testing did result in detection and identification of the mines throughout most of the day, but due to buildings blocking sunlight from reaching the ground for a certain part of the day, the landmines could not be detected. Although the landmines themselves were not visible in the flights before direct heating from the sun, the KSF-1 casing elements were clearly visible in the center of the simulated elliptical minefield as low apparent temperature anomalies.
The static testing yielded the following results:
- Butterfly mines were most visible 30–120 minutes after sunrise and sunset.
- The cobble-sized stones were effective in hiding the mines from the drones as the number of false positives increased when the number of stones covering the mines was increased.
Citation: Timothy deSmet, Alex Nikulin, William Frazer, Jasper Baur, Jacob Abramowitz, Daniel Finan, Sean Denara, Nicholas Aglietti, and Gabriel Campos (2018) “Drones and “Butterflies”: A Low-Cost UAV System for Rapid Detection and Identification of Unconventional Minefields,” Journal of Conventional Weapons Destruction: Vol. 22 : Iss. 3 , Article 10.
Available at: https://commons.lib.jmu.edu/cisr-journal/vol22/iss3/10


















