News
Autonomous Water Quality Testing and Sample Collection with a Drone
Unmanned Aerial Vehicle (UAV) or drones were recently used in a research project by a research team at the Department of Agricultural Sciences, Clemson University, to conduct In-Situ Measurements of Non-Contaminant Water Quality Indicators and Sample Collection.
Rising human population and industry pressure can degrade water quality in coastal and inland waters making effective water quality monitoring imperative and critical for water resource programs. Parameters that determine water quality of water bodies are contaminant and non-contaminant indicators which correspond to the status of water pollution and the comprehensive conditions of water quality correspondingly.
Regular monitoring requires laboratory evaluation of samples becomes necessary and the number of grab samples required can be numerous. Sometimes subsequent evaluations become necessary to facilitate management decisions about sampling events and to determine the level of contamination.
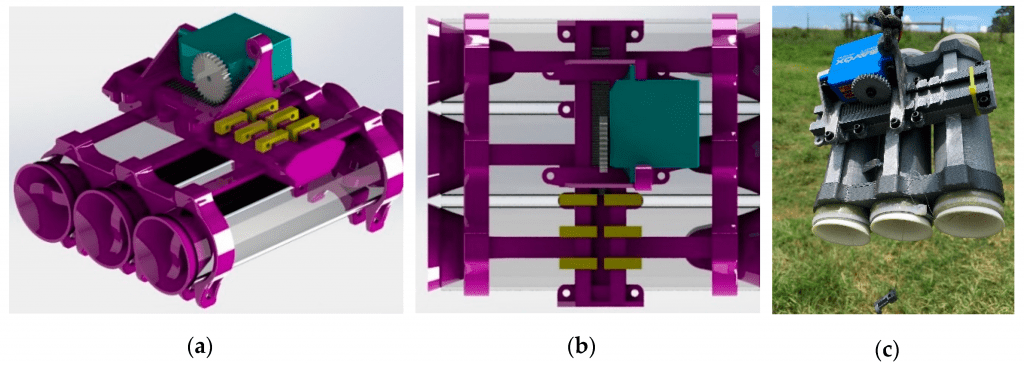
Figure 1. Water sampling cartridge and its components. (a) The green component is the servo, the yellow components are hooks, transparent components are cartridges, and purple components are the frame and caps, (b) the gray components are pinon gear and gear rack, (c) fabricated sampler.
Manual water sampling poses limitations due to the high spatial and temporal variability of the physiochemical and/or microbial parameters of water. Manual samples collected from the shore lack depth-specific water quality data. Fixed water quality monitoring stations collect continuous water quality data from the same location and depth. Some sensor stations are manually lowered at vertical direction in the water column at fixed intervals with a tether to measure water properties that vary with depth.
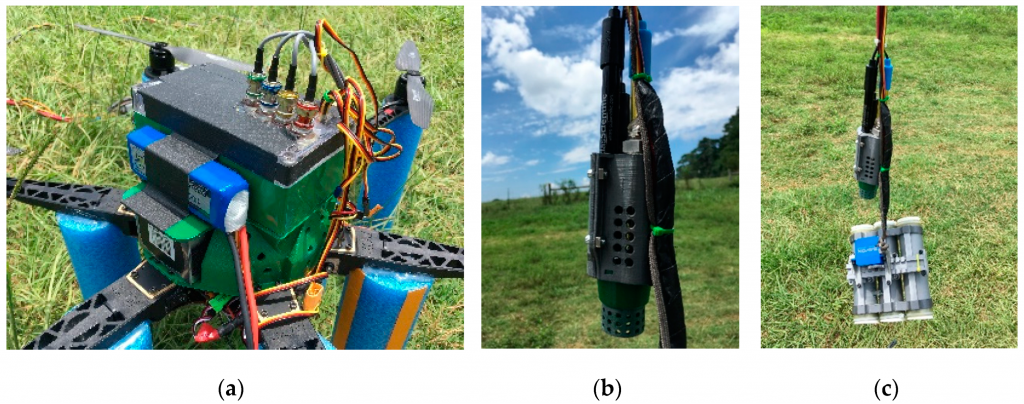
Sensor node; (a) microcontroller platform mounted on top of the unmanned aerial vehicle (UAV), (b) probes dangled from the UAV, and (c) probes located above the water sampling cartridges (WSC).
Underwater, surface, and aerial autonomous vehicles can collect water samples at various depths. However, water sampling from lowered water reservoirs with a kayak, canoe, or boat could create difficulties in accessing sampling points in case the water level recedes and the watercraft gets stuck or impeded by vegetation. In addition, the watercraft may disturb the water, agitating properties under investigation.
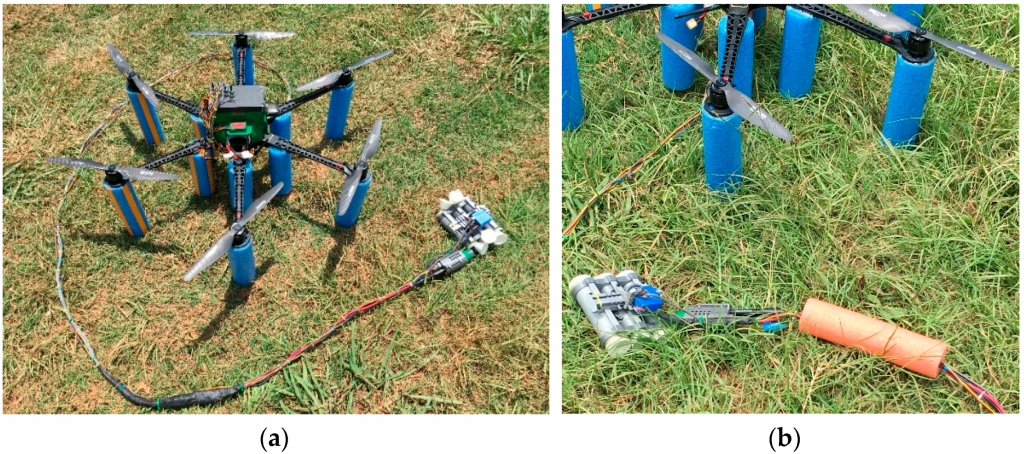
(a) The multirotor UAV that was built as a carrier platform for the (b) sensor node and the water sampling cartridge (WSC) with a closed cell floatation section for depth adjustment.
Such challenges are overcome by using UAVs for in situ measurements and sample collection results in reduced duration and cost incurred in sample collection and would increase the spatial resolution of water quality measurements.
During the trials the UAV system comprising a hexacopter, water sampling cartridges (WSC), and a sensor node was used to conduct in situ measurements of electrical conductivity (EC), pH, dissolved oxygen (DO), and temperature, and collect water samples simultaneously at different depths. The UAV was able to produce 106 N of thrust for 10 min with 6.3 kg of total takeoff weight.
The UAV and sensor node were autonomously controlled, and interventions were made with a remote controller when the stability of flight was disturbed due to a sudden wind gust or equipment malfunction. The UAV was equipped with floatation attachments to facilitate water landing and to increase flight time, thus reducing battery usage. In situ measurement depth was fixed at 0.6 m for all sampling locations after landing on the water surface.
Advantages of UAV-assisted sampling:
- Reduced duration of water quality assessment
- Conduct observations with lower operational costs.
- Reduced risks to field personnel.
- Better sampling and water profiling by enabling measurements from difficult to access water bodies such as abandoned mines.
- Spatially interpolated data from the sensor node mounted UAV were represented in water quality maps to visualize the distribution of the non-contaminant water quality indicators.
- Field data collected will be used for the development of algorithms for water quality assessment with satellite remote sensing and conducting water quality assessments after a storm event or natural disaster.
- May eliminate unnecessary sampling, increase UAV flight duration, and reduce operational costs.
- Multiple cartridges would allow sample collections from the same location at varying depths for water profiling.
- The UASS system can make a decision to collect a water sample for further analyses or navigate to the next sampling location over a water body.
Researchers concluded that he developed system is a practical and reliable water quality assessment tool for and practitioners. The system can perform rapid water quality assessment and sampling either separately or simultaneously without requiring intense training for the practitioners. Future work will include upgrading the sampling cartridge design with more cartridges, integrating turbidity and pressure sensors, and developing fully adaptive water sampling based on in-situ measurements.
Citation: Autonomous In Situ Measurements of Noncontaminant Water Quality Indicators and Sample Collection with a UAV, Cengiz Koparan, Ali Bulent Koc, Charles V. Privette, Calvin B. Sawyer, Water 2019, 11(3), 604; doi:10.3390/w11030604 – https://www.mdpi.com/2073-4441/11/3/604/htm