
News
Researchers Look at VTOL UAVs & Wind Estimation Using a Learning-Based Model
Vertical take-off and landing (VTOL) UAVs are gaining popularity day by day- used in spectra of industry segments ranging from urban photography to fire detection and control, and even agriculture operation amongst others.
Researchers Liyang Wang, Gaurav Misra and Xiaoli Bai at the Faculty of Geo-Information Science and Earth Observation (ITC), University of Twente, Netherlands with assistance from 3D Optical Metrology (3DOM) unit, Bruno Kessler Foundation, Italy are working on finding solutions to the challenges associated with the low accuracy of airspeed sensors in (VTOL) UAVs which use airspeed sensors. These sensors such as pitot tubes similar to those equipped on fixed-wing UAVs aren’t always reliable however due to the rotor down-wash effect for rotary-wing VTOL UAVs if the airspeed sensors are deployed close to the propeller.
The paper presented by the research team includes experimental results that demonstrate the accuracy and robustness of the developed wind estimation algorithms under hovering conditions. If UAVs could measure or estimate wind during their flight the information could be used to enhance the control for a more robust and safer flight.
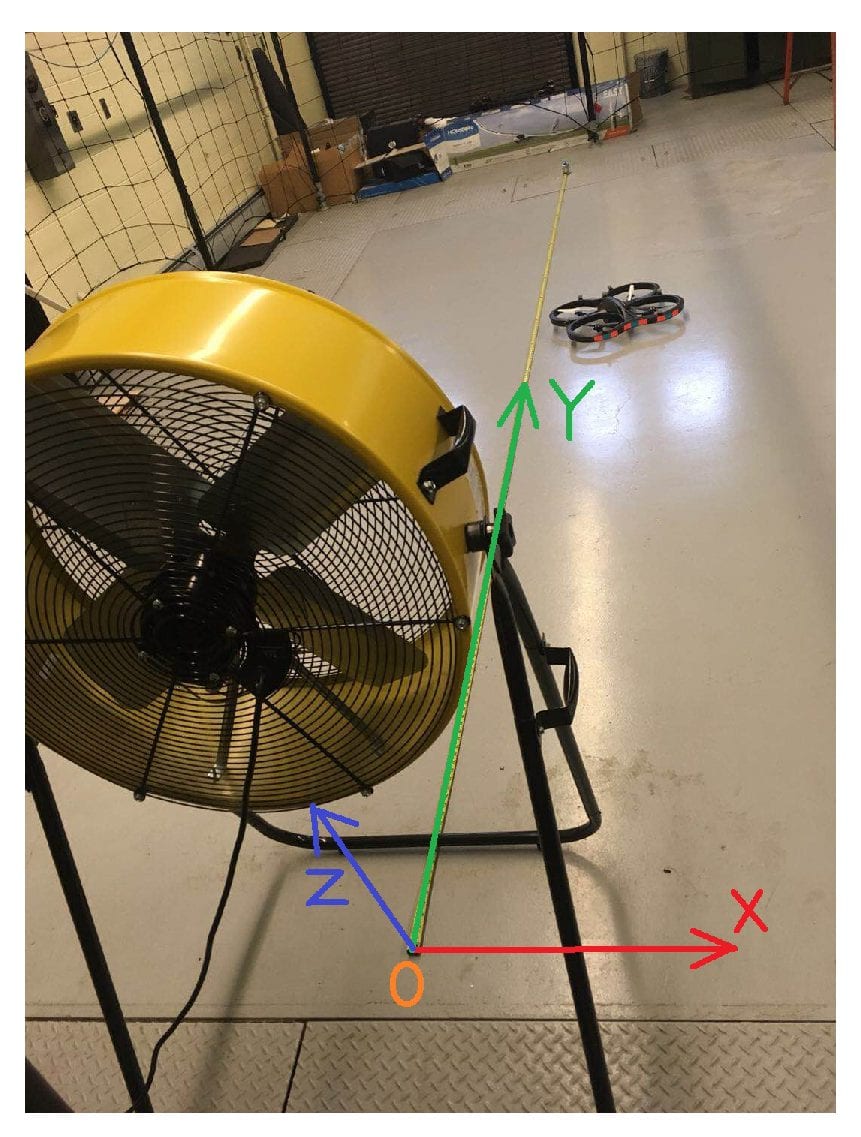
Coordinate system set up.
Research
The scientists used a K Nearest Neighborhood learning-based method which does not require the details of the aerodynamic information. The proposed method includes two stages: an off-line training stage and an on-line wind estimation stage. Only flight data is used for the on-line estimation stage, without direct airspeed measurements. They used Parrot AR.Drone as the testing quadrotor, and a commercial fan to generate wind disturbance.
Most conventional methods solve the problem by using equations including aerodynamic models and wind field models. Such models need the details of the dynamics to ensure good estimation result. Human UAV pilots, when flying the UAV outdoor, estimate the wind speed based on their experience by watching the response of the UAV with respect to the wind and their controls. During this process, they do not use mathematical models and they do not have to determine the parameters.
Inspired by this fact, the researchers used a learning-based method for rotary-wing VTOL UAVs to estimate the wind speed under hovering conditions, where the UAV is programmed to hover at a certain point. The testing involved introducing the wind field of the fan first, then comparing the wind field estimation of the proposed method and the result from the AR.Drone. The way points were assigned over the seven positions, the drone was made hover at each position for 20 s. Then, the saved database was used as the model, and K = 11 chosen to calculate the wind speed estimations. At the same time, the wind speed estimation results of from the AR.Drone embedded system were also recorded.
The key advantage of the proposed technique is that it works in situations where the aerodynamic model cannot be developed accurately instead only position, attitude, and control information are used to extract features. Direct air flow measurement from airspeed sensors is not required, so the payload of extra sensors is saved. Results were compared with those from the AR.Drone embedded system, and the estimation results are found to be more robust and reliable.
Equipment and System
The setup included a micro UAV a quadrotor helicopter Parrot AR.Drone. It has an ARM Cortex A8 processor to handle control commands and other electronics on-board. For sensors, it is equipped with an IMU, a magnetometer, an ultrasonic, a pressure sensor, and two cameras. There are 4 control channels to control AR.Drone.
The system code was run on a ground computer and streamed commands to the UAV over a Wi-Fi connection. Experiment results show that the delay of Wi-Fi communication has little effect on the control performance at the low flight speeds. A commercial fan made by MAXXAIR was used to generate wind in the lab. An anemometer made by Extech was used to measure the wind speed.
Conclusions
Experimental results show that the proposed method can estimate the wind accurately, with a 0.074 m/s average estimation error, and a 3.3% average estimation relative error, while the average estimation error generated by AR.Drone’s embedded system is 1.673 m/s. In future, the researchers intend to focus on wind direction estimation, and optimal selection of the features related to the wind direction. Future work will aim to focus on validation of the proposed algorithm in an outdoor environment.
Citation: A K Nearest Neighborhood-Based Wind Estimation for Rotary-Wing VTOL UAVs – Liyang Wang, Gaurav Misra and Xiaoli Bai, Drones 2019, 3(2), 31; doi: 10.3390/drones3020031, https://www.mdpi.com/2504-446X/3/2/31/htm






















