News
A Test-Bed for Real-World Drone Applications
A Test-Bed for Real-World Drone Applications
FlyZone test-bed architecture is unique in its approach – it offers a high-level API and features geared towards experimenting with application-level functionality. These include the emulation of environment influences, such as wind, and the automatic monitoring of developer-provided safety constraints, for example, to mimic obstacles.
In this new study the team deployed two instances of FlyZone, to study performance and effectiveness. The demonstration is realistic emulation of the environment influence with a positioning error bound by the size of the smallest drone tested. The localization technique provides a root mean square error of 9.2cm and detection of violations to safety constraints happens with a 50ms worst-case latency.
The study report reflects how FlyZone supported developing three real-world drone applications and discuses a user study demonstrating the benefits of FlyZone compared to drone simulators. The study commences with an existing implementation of simultaneous localization and mapping (SLAM) for the AR.Drone 2.0.
Application experience
The study reports the experience of using FlyZone for developing applications that eventually reached real-world deployments, and on a user study comparing FlyZone with a simulator and concludes by discussing alternative uses and limitations.
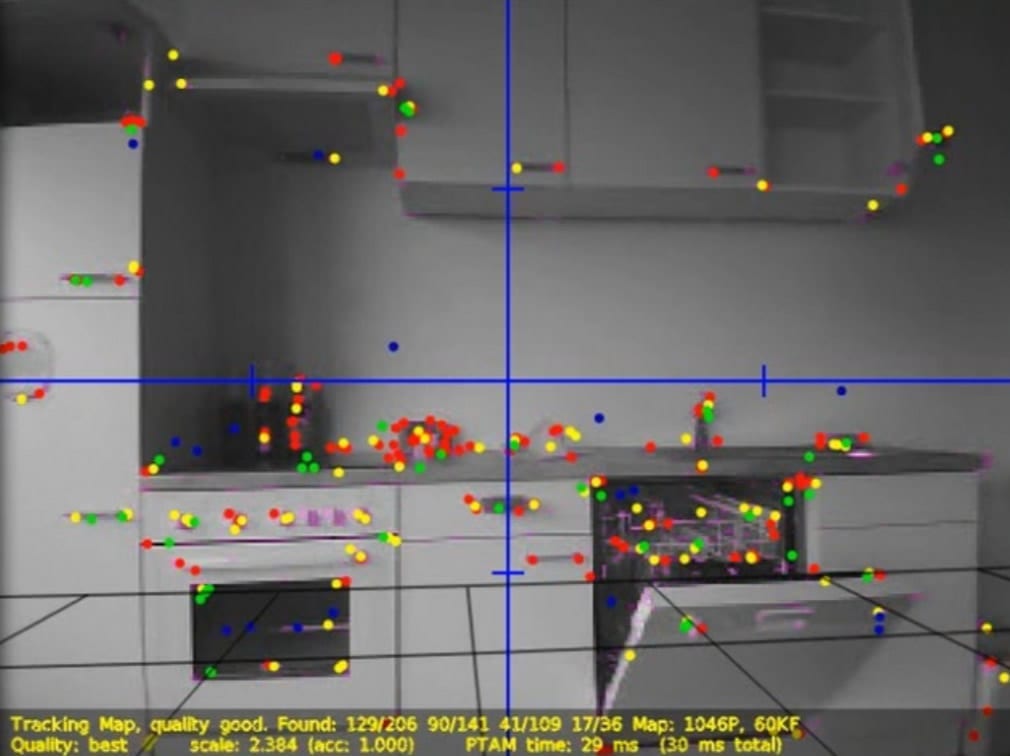
The parameters of the existing implementation are optimized for a domestic environment
Oil tank Inspection
The team used safety constrains to indicate where the drone was allowed to fly inside a mock-up oil tank. These are hostile environments, as gases originating from chemical residuals abound. Using drones therefore represents a viable alternative. Oil tanks are GPS-denied environments and cannot be instrumented beforehand. Autonomous navigation is to be achieved using visual or dead-reckoning techniques. The former tend to be more precise, but their performance is sensitive to the environment visual features.
The final prototype was eventually demonstrated in public, autonomously navigating mock-up oil tanks of arbitrary shapes and colors. Across 16 hours of such experiments, the system always correctly navigated the planned paths showing no unintended behaviors.
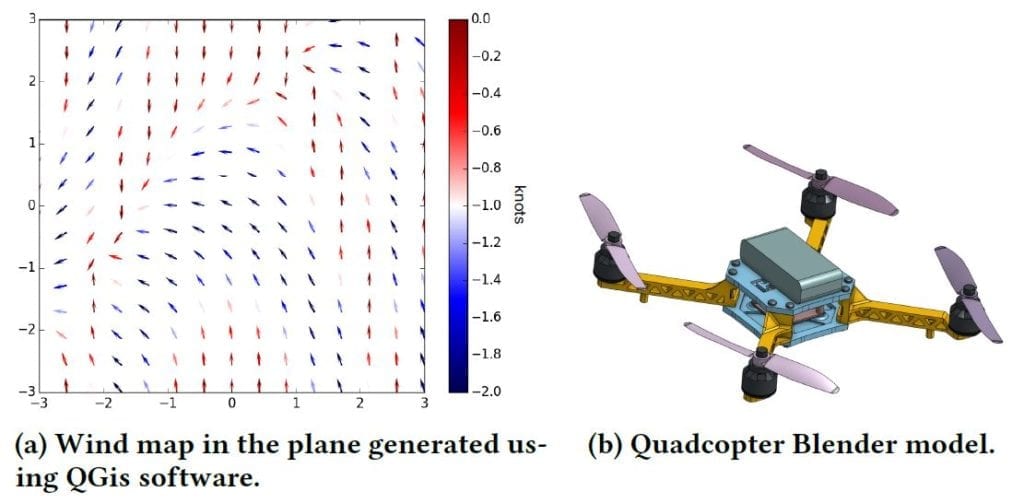
Inputs for environmental influence and parameter estimation.
Obstacle avoidance
The study gave students a task to develop an ambient intelligence application that uses drones to find lost items in a house. The items send a radio beacon the drone can locate with room-level accuracy. The students created mock-ups of a domestic environment and specified the space occupied by physical obstacles as not allowed for drones. This helped them extend the existing implementation to handle this specific case. FlyZone supported the development of the additional functionality. The effort was significant, as the additional code eventually accounted for more than half of the final implementation.
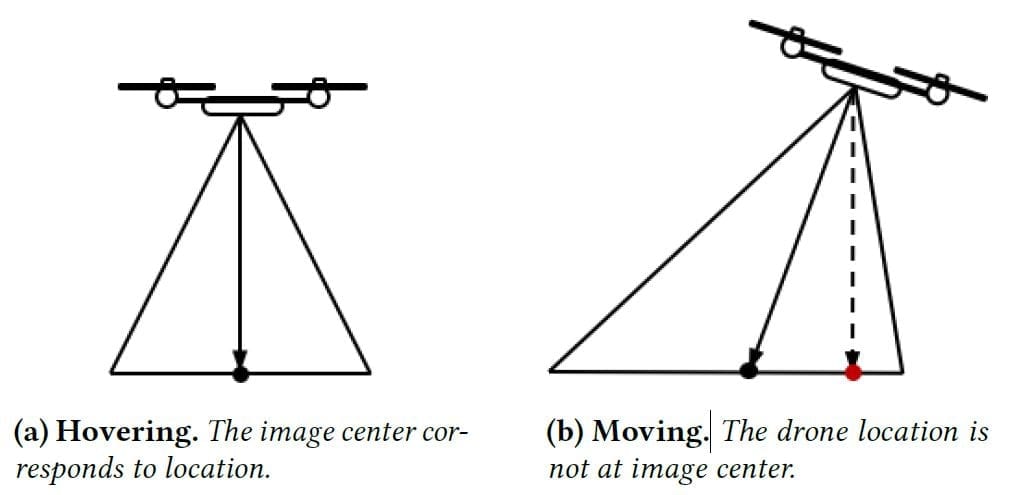
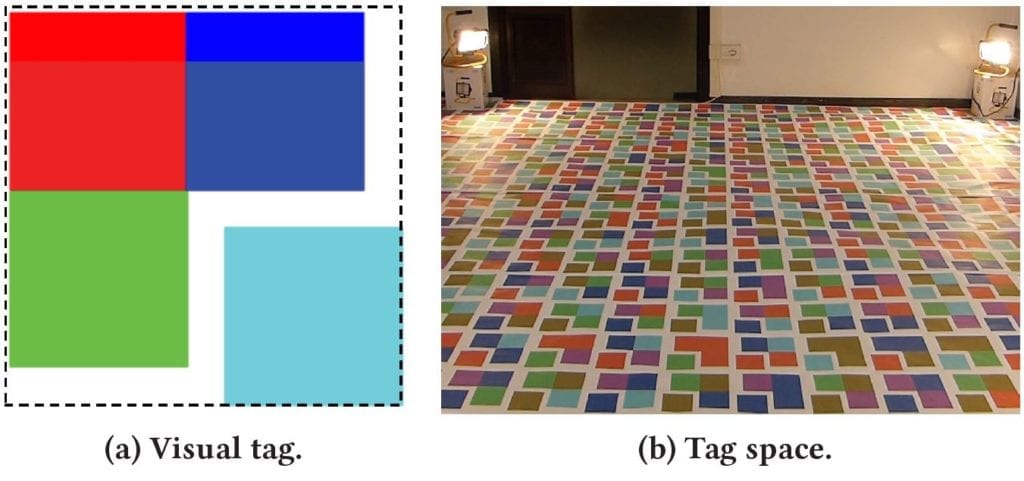
The camera perspective on the tag space changes when drones move.
Search and rescue
The team ran a student challenge comparing the use of FlyZone with the SITL simulator, the de-facto standard for simulating MAVLink-based drone platforms. The students worked in pairs to create a prototype search-and-rescue application using a custom hexacopter with a Raspberry PI 3 companion computer and an ARVA radio receiver for finding people under snow. The objective was to minimize search times. Group one to five used FlyZone-show better performance than the other groups who used SITL. Using FlyZone to emulate the environment influence led the groups to eventually obtain more efficient parameters able to withstand the environment effects. Other (non-)uses. FlyZone at ⟨OMISSIS⟩ is also helping a local piloting school train pilots towards obtaining the official license for flying professionally. Although not among the pre-set goals, FlyZone’s features have proved useful in this case too. The team wrote an experiment script specifying safety constraints to ensure that even the most novice pilot can do no harm. The same script triggers different “trials” to check whether the pilot can deal with environment influences, for example, due to wind gusts. FlyZone is currently the only indoor infrastructure that pilots can use to learn how to fly in realistic condition.
Developers of aerial drone applications are confronted with similar issues in a range of diverse domains, including ambient intelligence and search-and-rescue missions. Existing techniques enabling autonomous behaviours rarely work out of the box, as they are typically tested only in simulation, or require significant application- and hardware-specific customization. Developers are thus confronted with how to verify that their implementations meet the requirements at stake.
FlyZone provides several benefits. Unlike simulators, the additional development effort due to FlyZone is arguably small, while fidelity increases. Experimentation occurs using the same application code and drone platforms to be deployed in the target setting. In addition to portability across drone platforms, our design facilitates replicating the testbed infrastructure at different sites in a fully customized fashion. To that end, we do offer a well-defined set of procedures and scripts to automate this effort. FlyZone is entirely built with off-the-shelf commercial hardware, which facilitates obtaining the equipment and reduces costs.
In CONCLUSION researchers opined that FlyZone is a testbed infrastructure to support developing aerial drone applications. Its unique features include the ability to emulate the environment influence, which is achieved with a positioning error bound by the size of the smallest drone tested. A lightweight testbed architecture that maximizes decoupling from the main application and facilitates transitioning from testbed to real deployments.
Citation: Mikhail Afanasov, Alessandro Djordjevic, Feng Lui, and Luca Mottola. 2019. FlyZone: A Testbed for Experimenting with Aerial Drone Applications. In Proceedings of the 17th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys ’19). ACM, New York, NY, USA, 67-78. DOI: https://doi.org/10.1145/3307334.3326106




















