
News
Traffic Management for Drones Above the City
Traffic Management for Drones Above the City
Scientists, engineers and innovators all over the world are never and have never been short of creative ideas. There’s one massive underlying problem to it, though. A lot of our creative ideas do not make it to the real, commercialized world mainly because of the feasibility shortcomings. As we dream up different applications of different products, we are not always able to fully acknowledge the immense number of factors in the real world that would affect these applications. This is why so many tech startups fail.
Talking of tech startups, a lot of tech startups today are focused on the usage of drones; drone package delivery networks, drone security networks, drone agricultural systems, paramedic services with drones and of course traffic regulating drones. One major feasibility factor often overlooked in drone startups is the factor of traffic management for the drones. That is to say, how do we manage and regulate the travel paths of drones; to protect the privacy of the public, to protect the drones, to prevent vandalism and loss of property and to ensure predictability of automated drone paths.
A paper by Busyairah Syd Ali of the Faculty of Computer Science & Information Technology at University of Malaya, and presented at The 22nd Air Transport Research Society World conference at Coex, Seoul, South Korea, clooks at the safety concerns of UTM systems in comparison to ATM systems.
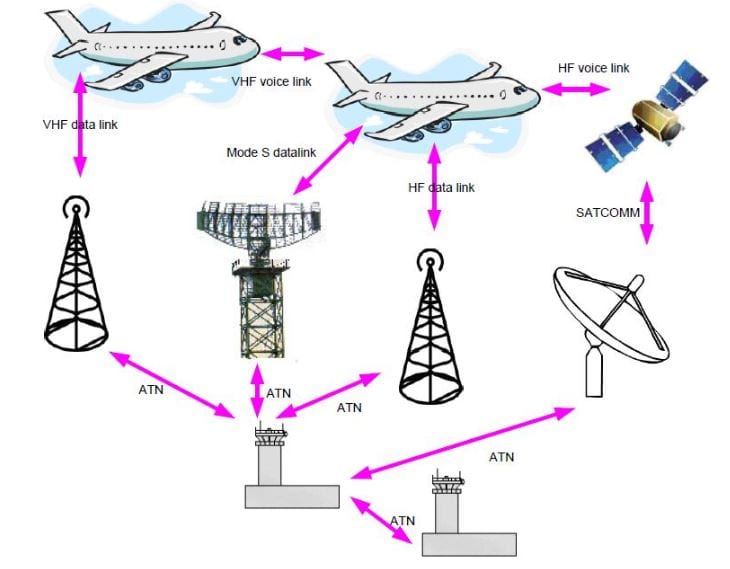
ATM communication environment ( Syd Ali, 2013 )
For this purpose, UTM systems (Unmanned Aircraft Systems Traffic Management) are utilized and researched by different companies and IT and Computer Science departments at universities and research facilities. The models of UTM vary in term of their complexity. In addition, some of the researchers proposes UTM operational concepts. However, none of the work addressed potential Communication, Navigation, and Surveillance means to support the UTM.
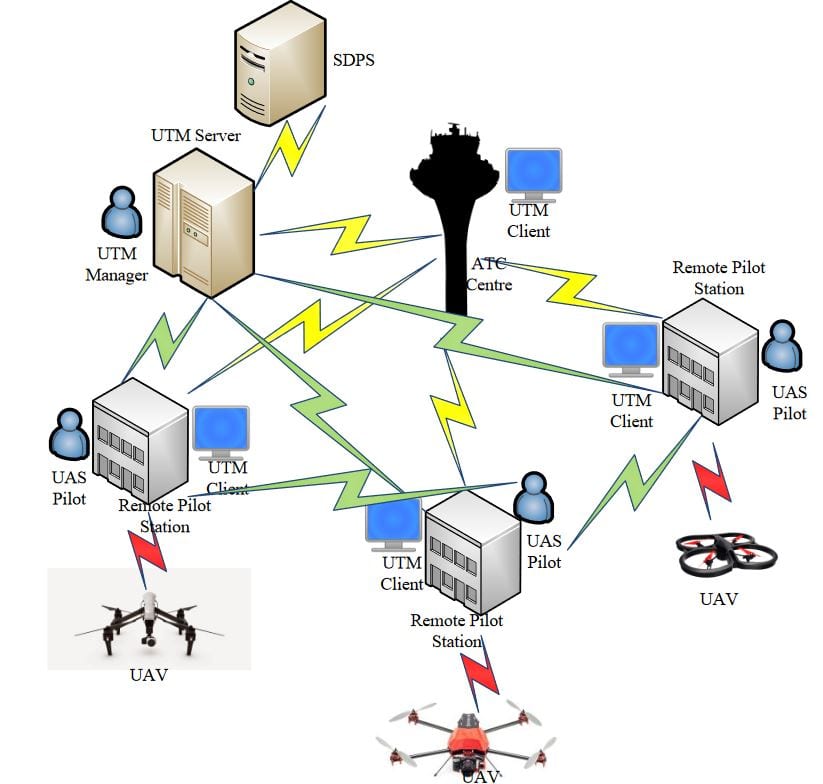
UTM Architectural Framework
Industries such as Amazon and Google have advanced in the UTM (Unmanned Aircraft Systems Traffic Management) practice. Amazon proposed an idea of ‘‘Determining Safe Access with a Best-equipped, Best-served Model for UAS (Unmanned Aircraft Systems)”, which classifies the UAS into categories based on vehicle equipment and technology, often referred to as equipage. Google’s architecture of UAS Airspace System also partitioned the airspace into several classes in accordance with Federal Aviation Administration’s (FAA) definition.
Below are some of the factors and elements of the UTM models commonly utilized in practice and research:
Airspace Operations and Management:
At present, UTM is envisioned to manage sUAS operations at 500 feet (ICAO, 2011; P. H. Kopardekar, 2017). Optimum utilization of an airspace depends on high performance navigation system on-board the UAV.
The airspace operations management service for sUAS includes the following functions:
- Airspace design and dynamic configuration;
- Authentication of UAV and operator;
- Retrieve flight plan/trajectory;
- Route planning and re-routing;
- Conflict detection
Wind and Weather Integration
The wind and weather integration service provides actual and predicted wind and weather information to the users highlighting which airspace is safe to operate and not. UAVs are more susceptible to wind due to its small size and weight, unlike helicopters and gliders.
Separation Management
Separation management is underpinned by high performance surveillance functions to track and locate the UAVs. A number of methods are available to perform separation management for UAS.
With these factors properly addressed and accounted for in actual real world drone systems and networks, drone applications would most certainly become more feasible and innovators involved with drone startups and programs would definitely get a lot more confident.
Reference: http://eprints.um.edu.my/18968/1/Traffic_Management_for_Drones_Flying_in_the_City.pdf























