
News
Research Shows Drones Could Shepherd Birds Away from Airports
We all know it. We have all heard of it. The sworn enemy of the pinnacle of human creativity and technology, of our marvelous ability to shorten the distances within the world, an aircraft; the sworn enemy of an aircraft is … a bird. Birds cause countless accidents by flying into the propellers and jets of aircrafts; choking them and causing the engines to fail. With a total of 13,000 annual bird strikes with aircrafts just in the US, they are not all fatal or catastrophic; but they have caused an alarming number of human casualties as well as property damage. With the first bird strike being reported as early as 1905 by none other than Orwell Wright, the damage rose as much as 62 human casualties in 1960 as a Lockheed Electra passenger plane flew into a flock of birds during its take off from Boston.
Airports are located carefully in places that do not have a very large bird population, flight times are regulated according to flock activity and several airports keep trained hawks and eagles to drive flocks of pigeons, sparrows and crows away from the airport, they also use scarecrows and install sirens and horns as well as loud canons and guns to scare birds away, several airports conveniently locate themselves strategically near crops that birds would prefer hanging around rather than move to the airport.
The task, however, like many other tasks in almost every sector, is about to be taken over by technology. As researchers in Korea Advanced Institute of Science and Technology (KAIST), Caltech and Imperial College London develop an algorithm to program a drone to work as a “bird shepherd” that would drive birds away from an airport.
Professor David Hyunchul Shim at KAIST in collaboration with Professor Soon-Jo Chung of Caltech and Professor Aditya Paranjape of Imperial College London investigated the problem of diverting a flock of birds away from a prescribed area, such as an airport, using a robotic UVA. A novel boundary control strategy called the m-waypoint algorithm was introduced for enabling a single pursuer UAV to safely herd the flock without fragmenting it.
The team developed the herding algorithm on the basis of macroscopic properties of the flocking model and the response of the flock. They tested their robotic autonomous drone by successfully shepherding an entire flock of birds out of a designated airspace near KAIST’s campus in Daejeon, South Korea. This study is published in IEEE Transactions on Robotics.
“It is quite interesting, and even awe-inspiring, to monitor how birds react to threats and collectively behave against threatening objects through the flock. We made careful observations of flock dynamics and interactions between flocks and the pursuer. This allowed us to create a new herding algorithm for ideal flight paths for incoming drones to move the flock away from a protected airspace,” said Professor Shim, who leads the Unmanned Systems Research Group at KAIST.
Since it would be very time consuming and frustrating for a person to maneuver a drone used to guide birds away and out of the airport or at least the runway, the developed drone is intended to work autonomously, on its own. The Unmanned Aerial Vehicle (UAV) is guided by an algorithm called m-waypoint which is a unique control strategy developed by the involved researchers.
The algorithm is based on the behavior of flock of different bird species; their flight patterns, their speed, the harmony of the flock and their response to different stimulus i.e. the actions of the shepherd UAV. The algorithm has not only been developed and simulated, it has been used as a prototype and tested at the designated airspace located conveniently near KAIST university. The test was wonderfully successful as the drones programmed by the m-waypoint algorithm guided away entire flocks of birds with a fair efficiency and accuracy.
So how does it work?
Two different drones with different programs were used simultaneously to drive the flocks away. As one of the two drones pursued the birds maneuvering like a bird of prey, the other drone worked as a lookout at a higher altitude constantly studying the patterns of the flock and their responses and giving suggestions to the first drone accordingly.
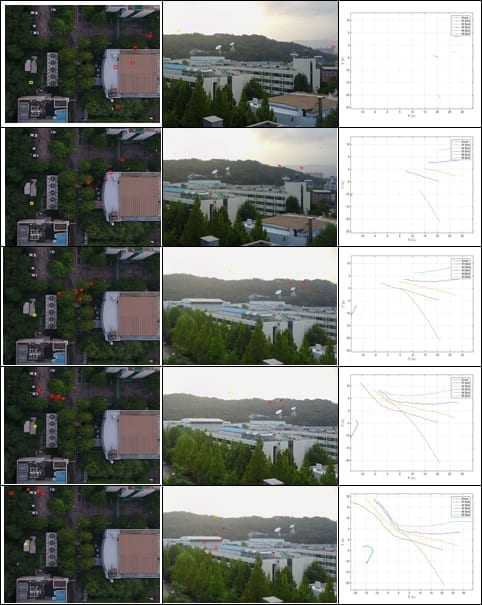
(Figure A. Case 1: drone approaches the herd with sufficient distance to induce horizontal deviation)
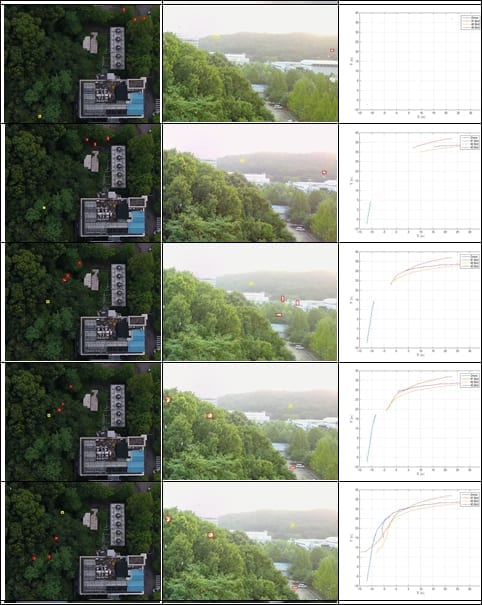
(Figure B. Case 2: drone approaches the herd abruptly to cause vertical deviation)
Here are the results of the two iterations of the experiments done on loons: “The drone approached the flock from the side. When the birds noticed the drone, they diverted from their original paths and flew at a 45o angle to their right. When the birds noticed the drone while it was still far away, they adjusted their paths horizontally and made smaller changes in the vertical direction. In the second round of the experiment on loons, the drone flew almost parallel to the flight path of a flock of birds, starting from an initial position located just off the nominal flight path. The birds had a nominal flight speed that was considerably higher than that of the drone so the interaction took place over a relatively short period of time.”
Professor Shim said, “I think we just completed the first step of the research. For the next step, more systems will be developed and integrated for bird detection, ranging, and automatic deployment of drones.” “Professor Chung at Caltech is a KAIST graduate. And his first student was Professor Paranjape who now teaches at Imperial. It is pretty interesting that this research was made by a KAIST faculty member, an alumnus, and his student on three different continents,” he said.























