
Industry
Drones for Avalanche Search and Recovery
With the rise of technology, safety has transformed from being a privilege to being a common need – especially when it comes to emergency response situations. One great example for this is the presence of avalanches in mountain areas.
While there is nothing one can do to prevent an avalanche, the after effects of one causing deaths and injuries can definitely be improved over the years. According to a new thesis by Lars Kambe Fjæra, of the Norwegian University of Science and Technology, Department of Engineering Cybernetics, there is a prototype system that can estimate the position of avalanche victims, all thanks to the use of unmanned aerial devices (UAVs), commonly known as drones.
Using a Transmitting Avalanche Beacon – Connected With Multi-Nodal Co-Variance
The system that is proposed in the thesis can only be used if the avalanche victim, buried into the snow, is wearing a transmitting avalanche beacon that is compatible with the standard of design for such equipment. The estimation process, on the other hand, is based on the Sum of Gaussians estimation technique for estimating the state of non-linear systems with multi-nodal co-variances.
As the paper outlines:
“This technique utilizes multiple parallel extended Kalman Filters working on a set of Gaussian distributions based on the current measurements made by the system. The final estimate is computed by assigning and altering weights for each Gaussian. The development of a prototype UAV based on off-the-shelf hardware has also been documented. Two programs have been developed in order to simulate measurements on board the UAV and transmit these to a computer running the estimation program. The project is based on open-source software.”
Getting the Help of an Expert to Develop a Customizable Prototype
Completed in cooperation with an Options AS co-supervisor named Espen Moller, who provided all the necessary components for a prototype UAV, this thesis uses many insights regarding the system design and the idea for further specification and customization of the project.
Obviously, the goal of the prototype is to tackle the difficult locating of avalanche victims and help reduce the number of deaths caused by avalanches.
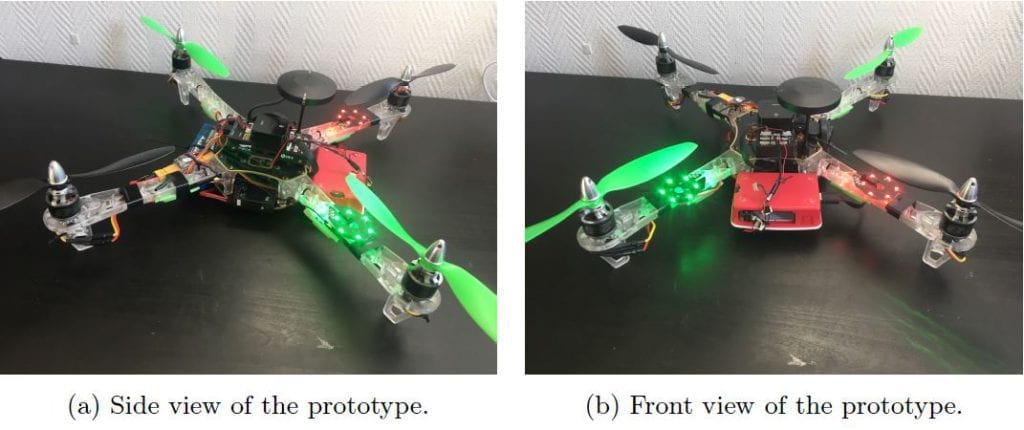
The purpose of the system is clear – to use multiple UAVs as prototypes that will function in avalanche search. Most of the models will be quadrotors that are equipped with PixHawk flight controllers and avalanche beacons, or compatible antennas, all in order to track signals from the buried avalanche beacon.
The UAVs will in that way transmit the received signal to a ground station and process the information from all available sources and calculate the navigation input for each of the UAVs. Obviously, the purpose is to utilize multiple data sources and ‘triangulation’ to determine the navigation input for the UAVs and ultimately the position of (each) buried beacon.

Outlining the Technology that Should be Implemented
In order for the system to function, a certain technology, methodology and processes need to be implemented. Precisely, the following aspects should all be put to action:
- A method for extracting processed data from an avalanche beacon or development of a similar solution for receiving the transmitted signal from a buried beacon.
- A communication system between the UAVs and the ground system. A starting point would be to use Wi-Fi compatible units onboard the UAVs that can communicate with the ground station, flight controller and beacon system i.e. Raspberry Pi or Intel Edison systems.
- The flight controller must be able to receive navigation updates in-flight. A starting point would be to explore the MAVLink protocol to update waypoints and heading reference from the auxiliary on-board computer that communicates with the ground station.
- The software running at the ground station to process measurements and calculate navigation input must be developed and implemented. As described above this software should utilize the measurements from all available sources to calculate the most suitable navigation input for the UAVs.
- The solution should be tested to some extent and relevant flight- and measurement data should be presented.

Prototype in the air. Loitering about 1 meter above ground.
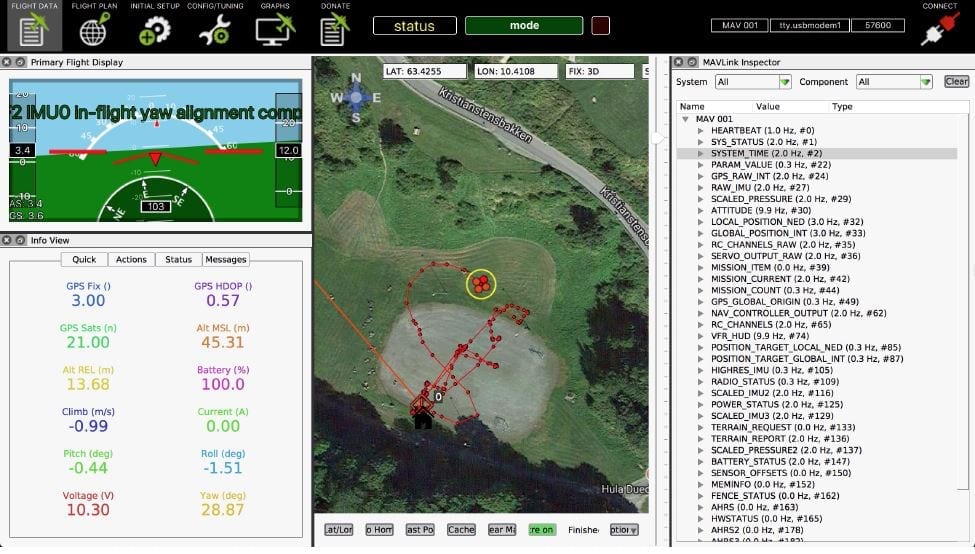
Screenshot of APM Planner 2 receiving telemetry over UDP link from Raspberry. The transmission rates for the different messages can be seen on the left.
Using the Responsiveness of UAVs to Locate Avalanche Victims
The entire idea, according to the thesis, has been elaborated in order to use the responsiveness of the UAVs and therefore locate avalanche victims. Using drones in a system like this can be quite practical for rescuers – mostly because of their ability to take off from designated stations in the vicinity (such as ski resorts) and arrive at the avalanche site in relatively short times. The full thesis with illustrations, concepts and explanations can be downloaded on this link.


























