Drone Delivery
A String of Drones to Share the Load
A String of Drones to Share the Load
Drones or UAVs are becoming increasingly looked at as a viable option for package delivery and there is plenty of research aimed at increasing the load that can be carried by a drone without spending too much power in terms of battery.
A load can be carried by a drone in a multitude of configurations, which might change mid-flight. Each of these configurations has to be picked such that it suits the job well; most importantly, the number of drones used should be able to carry just the right load. A critical factor would be power consumption as too much power consumption can run through batteries really fast and reduce flight time.
Some of the configurations include counteracting carrying forces, which deteriorate energy efficiency, harming the flight time and battery life. The research paper, String of Drones for Load Carrying was proposed by Shai Arogeti and Dolev Yehezkel, a pair of Mechanical Engineers from Ben-Gurion University of the Negev in Israel just to tackle this problem.
So how did they tackle the problem? How did they create an efficient configuration?
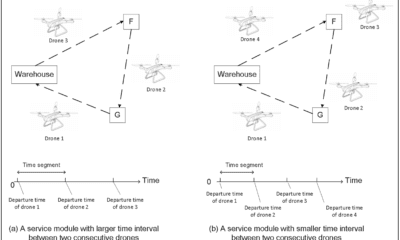
The researchers propose an innovative drone configuration that is based on a string of drones. The drones are connected such that they form a string or chain with each other. Each drone is connected to the drone immediately below itself, by a cable, and the lowest drone is connected with the load. This is essentially a number of drones connected in series.
The first question we should be asking is, why This solution? How does it help overcome the problem of carrying maximum load without compromising on energy efficiency or flight time?
This is what the original authors of the paper have to say regarding what they learnt from other research papers that they have referenced:
“The control problem of a cable-suspended load, carried by a single drone was investigated for the two-dimensional case, and for the three-dimensional case. These studies were focused on the two-mode system behavior; one in which the cable is taut, and the other in which the cable is loose. Their analysis showed that the system can be considered as a hybrid differentially-flat system, an attribute that allows optimal trajectory tracking. The authors show experimentally that the load motion can be controlled up to a frequency, close to the natural frequency of the system. These results were extended to the case of multiple drones. It is said there that a group of drones provides improved carrying capacity, and could minimize load fluctuations.”
That is, essentially, why the idea of using multiple drones or a string of drones is used for load carrying. But simply multiple drones don’t form a discrete configuration. The paper distinguishes between two cases; a point mass load and a rigid body load. For each case, the total degrees of freedom, and the number of uncontrolled degrees are studied; narrowing down the selected configuration to a comparisons between configurations formed by the usage of multiple drones.
When a swarm of drones or a series of drones or a string of drones is used to carry a load, a very high coordination between the drones is required, as well as collision avoidance. When a load is carried by a group of drones, there is another risk of collision with the cables of other drones, or cables can get tangled together. On the other hand, since the relative position of the drones can be measured with good accuracy using some conveniently available and programmable sensors, planning and implementing mechanisms for collisions avoidance is somewhat simpler.
The energy efficiency of the group, when carrying a shared load, is a significant issue. That efficiency is critical with practical implications. In fact, if there is a cable with one or more components in its direction, that is negative with respect to the direction of another cable, then forces are counteracting; which can seriously affect the efficiency of the whole system, which is catastrophic in case of drones.
The researchers derived a complete, detailed mathematical model of single drone using equations governing the flight of the said drone which was generalized and the same model was applied to a pair of drones.
However, the research paper has acknowledged but not fully derived a mathematical model for “n” number of drones; with a quantitative examination of the model’s energy advantage. The development of such a model is a future research prospect considered by the original researchers.
Citation: S. Arogeti and D. Yehezkel, “String of Drones for Load Carrying,” 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 2018, pp. 1199-1206.
doi: 10.1109/ICUAS.2018.8453312 URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8453312&isnumber=8453276