
News
Autonomous Drone Racing
There are a lot of new sports that are shaping the 21st century, inspired by technology and spreading excitement all over the world. One of them is drone racing – a sport where human pilots have to control their drones to fly at high speed through different environments while passing obstacles in a pre-defined sequence.
Shifting the Drone Infrastructure in Sports with an Autonomous System
As much as it is exciting, this sport is also challenging and demanding from a technological point of view. The first person view (FPV) makes it even more popular, since the pilots are more engaged in the entire race. However, there is also one question raised by a lot of followers of this sport:
‘Can drones fly and race by themselves?’
To answer this question with an actual infrastructure in place, a new paper submitted by a number of authors at the Delft University of Technology in the Netherlands aims on developing an autonomous system for drones that will help them race fully autonomously using only onboard resources.
So, instead of the commonly used visual navigation methods, this system is efficient for visual navigation which can detect gates at 20Hz on a Parrot Bebop Drone. The authors also developed a robust pose estimation algorithm with better tolerance to detection noise – all of which helping the drone to fly to the next gate and win the next race.

The Parrot Bebop 1 is used as experiment platform. The software is replaced by the Paparazzi UAV open-source autopilot project
Autonomous Drone Racing: Building a Sustainable Racing Model
In an autonomous drone race, the drones would fly through circles or gaps and finish the race by themselves. Even though this could mean less excitement for the actual pilots – it could also mean more technological challenges for the innovators.
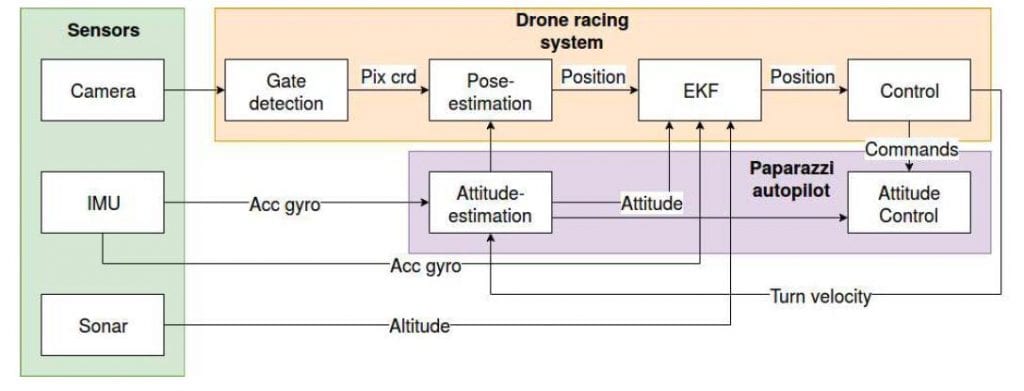
The structure of the autonomous system
The paper mentions a new system through which drones can detect the circles (in a similar way that they detect obstacles) and go into their trajectory through the gaps using only onboard resources.
As the authors state in the paper:
“Multiple studies have focused directly on autonomous drone racing, designing a strategy that will allow to fly an entire trajectory. Although an interesting approach, it ignores several of the real-world aspects of drone racing, such as restricted onboard computation or how to deal with accelerometer biases. NASA’s Jet Propulsion Laboratory has developed an autonomous racing drone controlled by AI, which can fly almost as fast as the racing drones controlled by expert human FPV pilots.”
In the paper, they also present a solution for autonomous drone racing which is computationally more efficient than all of the solutions that are in place today. Through a novel light-weight algorithm, the authors of the paper combine the onboard altitude estimate with the gate detection result in order to determine the position of the drone.
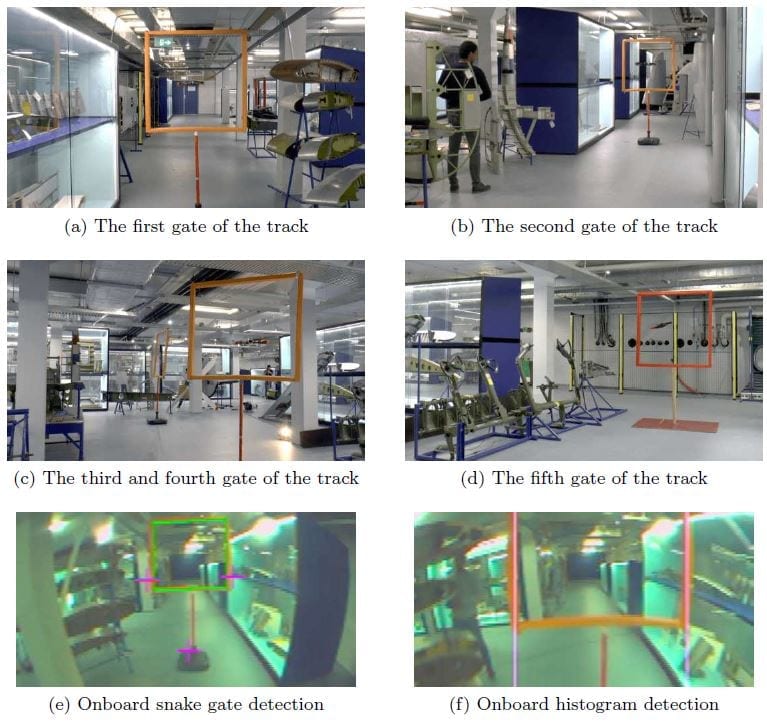
Five gates are placed in a dense obstacle track. The gates are placed in narrow corridors and are surrounded by dense obstacles such as aircraft aps, rudders and yokes. The first two row images are the environment around the gates and the last row are the onboard images with detection results.
Using a Parrot Bebop 1 as tThe Test-(Auto)Pilot for Future Work
The authors use a Parrot Bebop 1 which is configured to have its own navigation and control using the Paparazzi-UAV open-source autopilot project. The system runs on Linux and has a FPV camera which includes a novel algorithm with snake gate detection and obstacle avoiding features.
“In terms of control, when the target gate is in the field of view, a PD controller is used to steer the drone to align with the center of the gate. After passing through the gate or there is no gate in the field of view, a prediction-based feed-forward control scheme is employed to steer the drone to the next gate, which will be further explained in Section 4. An adaptive incremental nonlinear dynamic inversion (INDI) controller is used as low-level attitude controller”
By dividing the race track in two parts – one when the drone is approaching the gate and the other when it is passing it (and focusing on the next one – the authors of this paper think that their sensor-based model can be used in the field of autonomous drone racing. As they say, their “systematic scheme” can help them accomplish the task of autonomous drone racing as held by IROS in 2017.
Citation: Autonomous drone race: A computationally efficient vision-based navigation and control strategy, S.Li, M.M.O.I. Ozo, C. De Wagter, G.C.H.E. de Croon | arXiv:1809.05958 [cs.RO] | https://arxiv.org/abs/1809.05958
























