Drone Delivery
Stack Approach to Cooperative Drone Lifting
Unmanned Aerial Vehicles (UAVs) are increasingly being tested for load-carrying applications. Systems of cooperative drones are being researched around the world so as to develop effective ways of carrying heavier loads. A new paper aims to contribute to this field.
The existing transportation infrastructure is getting increasingly cluttered in urban areas and inaccessible locations, and the use of UAVs can potentially act as one of the remedies and alleviate the congestions. Besides that, UAVs have found applications in a large array of fields including package delivery, search-and-rescue, terrain mapping, pipeline inspections, agriculture, and for military purposes because of the fact that there is very little set-up time for drones, and neither is there any need for someone to be onboard the vehicle.
The application that this new paper focuses on involves the use of drones to carry and transport payloads. Single UAV systems have become widespread, however to increase loading capacity, multi-drone systems are being preferred. This is because single-drone systems suffer from two major issues i.e. scalability: the ability of a system to adopt to the magnitude of a task, and modularity: the degree to which a system’s components may be separated and recombined.
Owing to these factors, the use of a number of coordinated drones, working in collaboration is being explored for load-lifting applications.
The research paper, titled A Vertical Stack Approach to Cooperative Drone Lifting, is a thesis published by Stian Late, a student studying for a degree in Masters of Science in Cybernetics and Robotics in the Department of Engineering Cybernetics, of the Norwegian University of Science and Technology, Norway. The thesis was submitted in June 2018.

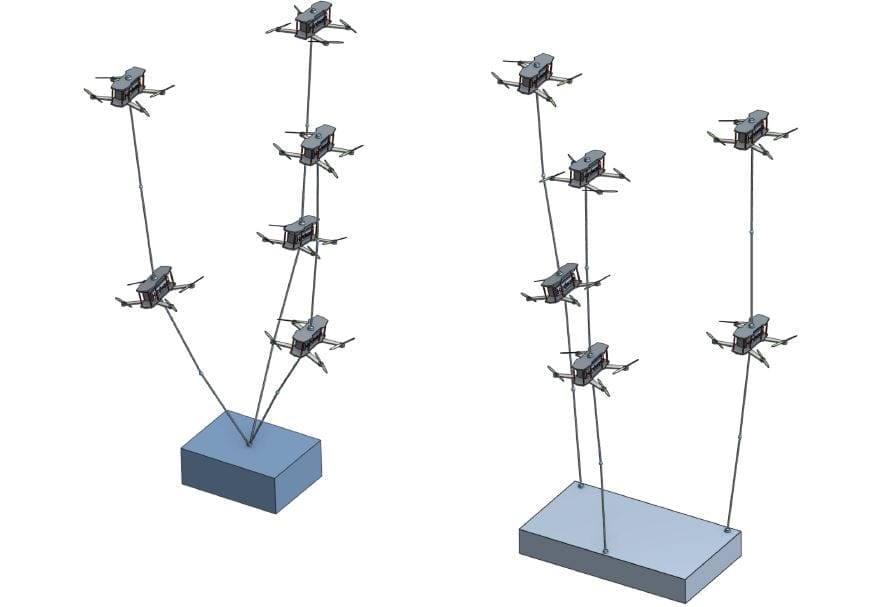
In situations where the conventional flat lifting schemes are applied, replacing individual drones with vertical stacks would improve lifting capacity.
This thesis presents a novel approach to cooperative drone lifting which aims to alleviate the challenges that have been described. They propose a new formation which is referred to as the vertical stack formation, in which multiple drones are interconnected in a vertical formation. The physical connections are made as two rigid, lightweight rods connected by freely rotating joints.
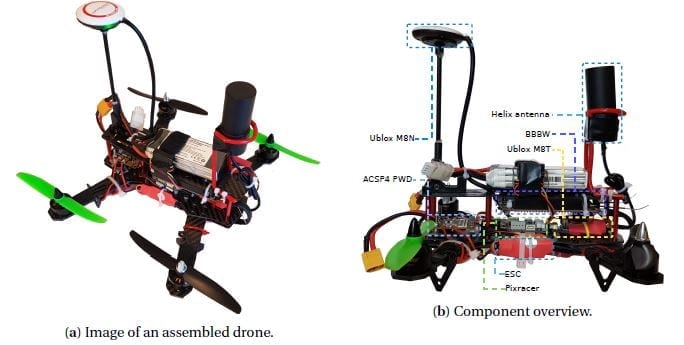
Images of the components assembled into a single drone.
The examination of this novel concept was divided into two main parts, one was a derivation of a system model with subsequent simulations, and the other was a real-world implementation. Single drone flight was achieved using the realized system, and with the simulated system including aerodynamic influence, a vertical formation containing ten drones successfully traversed the desired path.
The field of drone swarm technology has advanced rapidly in recent years. In the future, shifting from a coordination-based to a cooperation-based approach will make package delivery and transport of payloads a much more viable option commercially. The challenges associated with existing methods for cooperative drone lifting are limited scalability, and complicated collision avoidance.
Current formations used for cooperative load lifting by a number of drones involve a configuration in which all the drones are in a single horizontal plane. This is structured so that each drone is connected directly to the payload while maintaining a safe distance to the other connected UAVs. These are called flat lifting schemes.
However, there are several problems associated with this. This makes collision avoidance a demanding and risky problem which must be considered. Moreover, the requirement of a minimum safe distance between every pair of drones means that a large number of drones will easily clog up the airspace above the load. Thirdly, in a flat scheme, only a very limited number of drones can operate with a zero-degree tilt angle and this means that a lot of the force-carrying capability is lost. Finally, there is also an issue with increasing the number of drones since the rest of the drones will have to accommodate the additional drone, allowing it to make contact with the payload beneath.
Therefore, the author has presented a new approach that has been named a vertical stack configuration. This solves the problems that are mentioned above.
In the described approach, each drone is equipped with two freely rotating rigid links. The links and drones are designed to allow for interconnection, forming a chain of drones. The drones used for modeling and development in this project are standard quad-copters due to cost, accessibility and pervasiveness in academia.
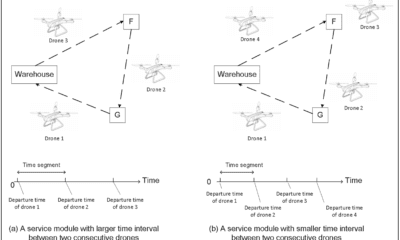
In the simulation model developed, a three-layer control system has been modeled. The first layer is meant for controlling the individual thrust of each drone and guide its movements. The second one is responsible for cooperating the multiple drones with each other, making them into a system. The final one is meant for allowing the multi-drone system to execute mission profiles.
Citation: ‘A vertical stack approach to cooperative drone lifting’, Låte, Stian, Institutt for teknisk kybernetikk http://hdl.handle.net/11250/2563986