Autonomous
Choreographed Drone Swarm: 25 Drones Perform Wave Motion
Drones are in the scientific research news again, this time because of their swarm potential, in particular drone swarm performances, where the swarm acts as an integrated, coordinated unit embodying moving and deforming objects.
A new paper submitted by a group of authors aims at creating a choreography into three basic steps for this type of drone or quadcoptor, in which:
- the first step would include the design of swarm motion primitives
- the second step will focus on the transition between those movements
- the third step will focus on the synchronized motion of the drones
As a result of these steps and the efforts by the authors, there could be a flexible framework developed for designing choreographies comprise of a wide variety of motions. The motion primitives can be intuitively designed with the use of a few parameters, according to the authors, mainly to provide a rich library for choreography design.
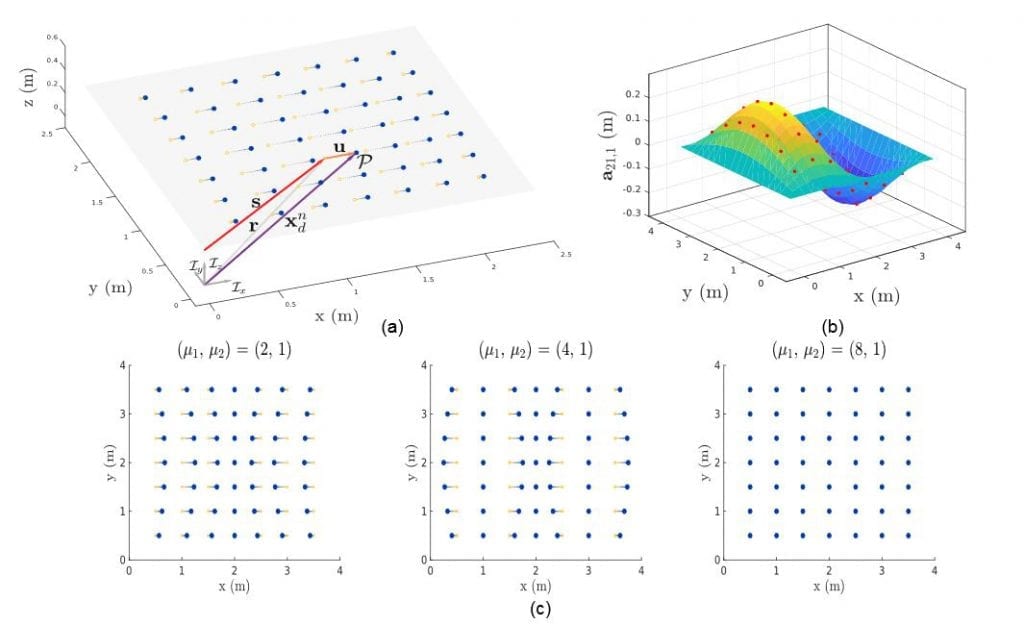
This figure shows an example of a wave pattern on a bounded elastic surface represented by 49 drones positioned in a grid configuration. In (a), we show a schematic of a 1D wave motion over a quarter of a period where hollow circles and solid circles indicate the equilibrium and peak position, respectively.
The Use of Trajectory Generation Algorithms to Maximize the Smoothness of Transitions
The smoothness of the transitions in quadrotor drones is among the biggest issues that needs to be addressed – and one that the group of authors is focusing on in this paper. The proposed methodology has been validated experimentally with different choreographies of swarms of 25 quadrotors.
As the authors noted:
“The motion primitives embody moving and deforming objects and are inspired by natural particle phenomena such as wave motions or rigid body rotations.”
Throughout the paper, the authors focus on the generic formulation of drones, their wave patterns (motions) as well as the transition trajectory planning, which as we said, is very important for coordinating the swarm to make smooth and safe transitions.
Their goal is collision-free and smooth trajectory generation which focuses on each drone in particular as well as the entire group of drones as a whole.
There are also many design considerations in the project. As outlined by the authors:
“In order to generate smooth transition trajectories, a few key design decisions were made that differentiate our method from those in previous work. First, the vehicle dynamics and transition time are incorporated into the assignment cost function Ja in order to facilitate smooth trajectory generation in the following steps. Second, trajectories are parameterized with a single polynomial curve instead of concatenated polynomials to minimize unnecessary curvature. Finally, continuity in trajectories at ts and te is guaranteed in the collision resolution step.”
Motion Patterns – And Their Potential Synchronization
The next step in the development of a drone system that would synchronize the quadrotors and quadcopters in swarm movements is the synchronization of motion, which appears to be the main challenge for the authors.
“To execute the proposed highly-dynamic motion patterns in tight formations and in sync with the desired periodic motion pattern, a high-accuracy controller for periodic motions is required. In practice, one major issue that can be observed is the phase shift and amplitude amplification or attenuation due to the delay in communicating vehicle commands, the inherent delay in dynamical systems, as well as the delay in sensor measurements. It is possible to reduce delay and amplitude error by adding feed-forward terms to the drones’ position and attitude controller. However, it incurs communication overhead which is not ideal and sometimes impossible for a large swarm.”
The experimental results, however, have shown that the algorithm works and garhers position data from all the drones in the fleet using an overhead motion capture system. The data is sent via radio to each drone and its onboard computer, along with the desired position which is tracked through an onboard position controller.
Final Words
The end conclusion of the authors shows the clear guidelines for creating performances with quadrotor swarms which leverage their motion capabilities in order to create appealing visual effects – which as mentioned above – can be used for creating choreographies of all kinds.
“…We provided a hierarchical transition trajectory planner to seamlessly connect motion primitives together and preserve geometric characteristics. Lastly, a correction algorithm is proposed to improve the quadrotors’ tracking performance of the periodic motions, which allows the swarm to perform synchronously and in close proximity to each other. ”
It is evident that an experiment like this can have great importance in the following development of drones and their potential use in the future.
Citation: Fast and In Sync: Periodic Swarm Patterns for Quadrotors, Xintong Du, Carlos E. Luis, Marijan Vukosavljev, Angela P. Schoellig, arXiv:1810.03572 [cs.RO] https://arxiv.org/abs/1810.03572