News
Navico Patent for a Marine Drone
Due to constraints on physical human abilities underwater, detailed marine investigation has always required the aid of tools and equipment capable of effective navigation, detection and interpretation of stimulus, search and rescue, data collection and recording etc. Unmanned vehicles are under rigorous research in order to improve their functionality for particular tasks to be carried out in marine environments owing to their maneuverability and safety accounting for several challenges associated with under-water operations.
Invention
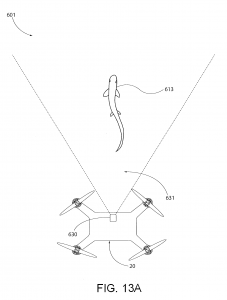
An unmanned vehicle especially developed for marine operation has been patented by inventors from Navico Holding AS under the title, Unmanned Vehicle Control And Operation In A Marine Environment.
Mode of control
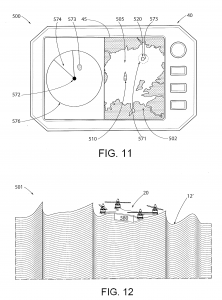
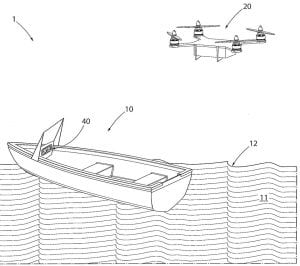
The unmanned vehicle as developed is controlled by a marine electronic device or a controller in a vessel governing its motion and course of actions.
Basic Equipment
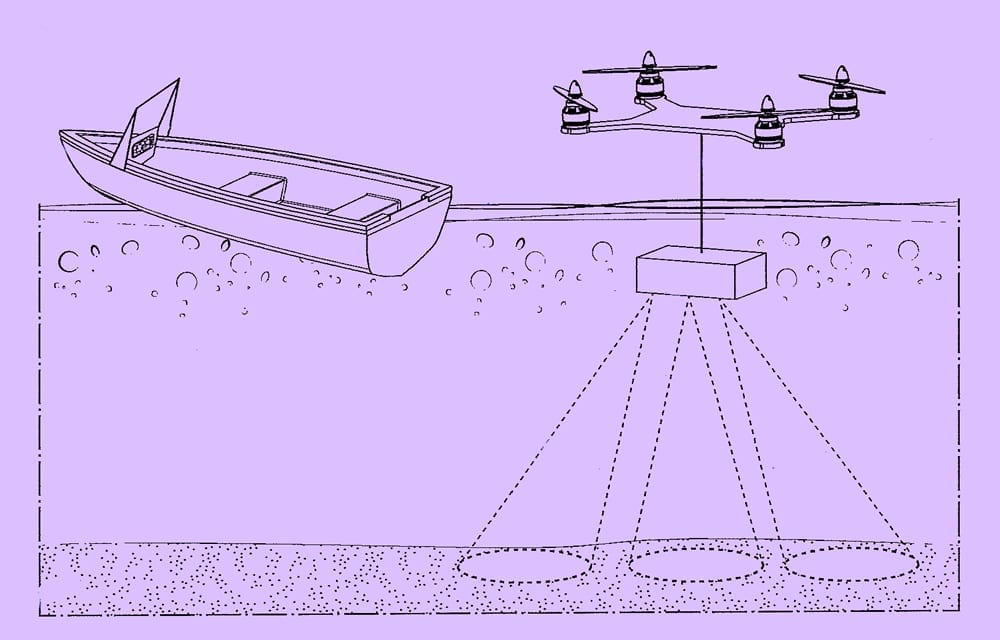
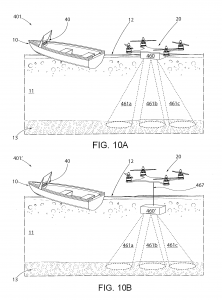
- It is equipped with a location sensor that constantly tracks the vehicle’s location in space in a marine environment.
- A propulsion system is installed to propel the vehicle and control its speed and direction governed by the controller.
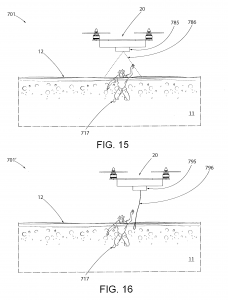
- At least one operational component is programmed to gather data during the course of operation performed by the unmanned vehicle. This operational component gathers data by the means of sensor(s) that are configured to obtain different kinds of data particular to each sensor. A camera could also be configured to act as a means for gathering data in terms of images or footage.
- A transmitter is also installed which is installed to transmit data to the marine electronic device or to the controller so that the vehicle can be operated accordingly.
- Since the controller constantly transmits instructions to the vehicle, the vehicle is equipped with a receiver that receives these instructions and forwards them to the processor.
- The processor translates the instructions received from the controller into operation of the unmanned vehicle.
-
Program Functionality
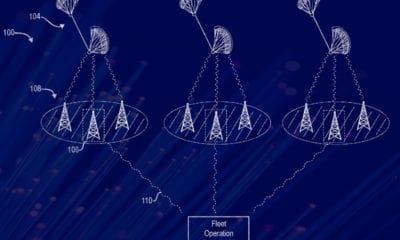
Since the vehicle is unmanned, it relies on careful programming of the operation relevant to the task assigned to the vehicle for its effective functionality. Thus, a computer program is configured to determine location of the unmanned vehicle and transmit the said location to the controller that is further programmed to give feedback to the vehicle’s processor to adjust the vehicle’s actions as per its location.
The computer program product is further configured to receive a control signal from the marine electronic device. This control signal includes instructions to travel to a desired location based on a planned route or waypoint stored in memory of the marine electronic device according to the task to be performed by the vehicle.
The same program also governs the data collection from the sensors installed on the vehicle and their transmission to the controller or marine electronic device for its interpretation and analysis.
Patent: https://patents.google.com/patent/US20180275649A1/en