News
Dynamic Collision Avoidance Using Local Cooperative Airplanes Decisions
Nowadays, Air Traffic Control (ATC) is a developing practice. In the future, we expect to see a radical change in the structure of air transport, which is why collision avoidance is one of the main issues that need to be addressed.
Since there is a magnitude of drones with different flight performances and features, a proper framework needs to be established – mainly to investigate the collision avoidance management problem using a decentralized and distributed approach.
This is exactly what a group of authors at the University of Toulouse in France are focusing on – in a new paper that is titled “Dynamic Collision Avoidance using Local Cooperative Airplanes Decisions” and aims to validate a system using state-of-art benchmarks, underlining the importance of such technology.
Supervision in Airspace is “More Than Needed” According to the Authors
In the introduction part, the authors are focusing on the proper legislation and regulation of air transport, pointing out to the several zones in today’s airspace.
“In today’s air traffic management, airspace is divided into several zones each under the supervision of air controller. In order to help air controllers to manage real time traffic and avoid collision, the traffic is regulated upstream. With the increase in the traffic and the insertion of new aerial vehicles such as drones into the airspace with different flight performances, the air traffic control must evolve by increasing the level of automation and introducing partial delegation of the control to on-board systems.”
In the following sections, the work aims to plan a clear environment with dynamic constraints, multiple vehicles and an objective of optimality – focusing on motion planning and a desired trajectory for most of the universal drones – all in order to prevent collisions.
Note: The paper does not focus on the navigation of multiple robots to a single destination – or the control of a swarm formation.
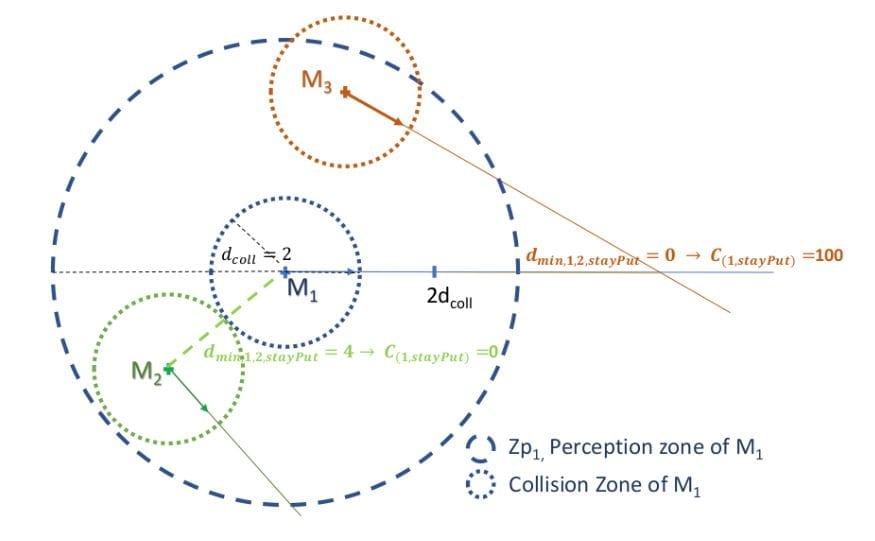
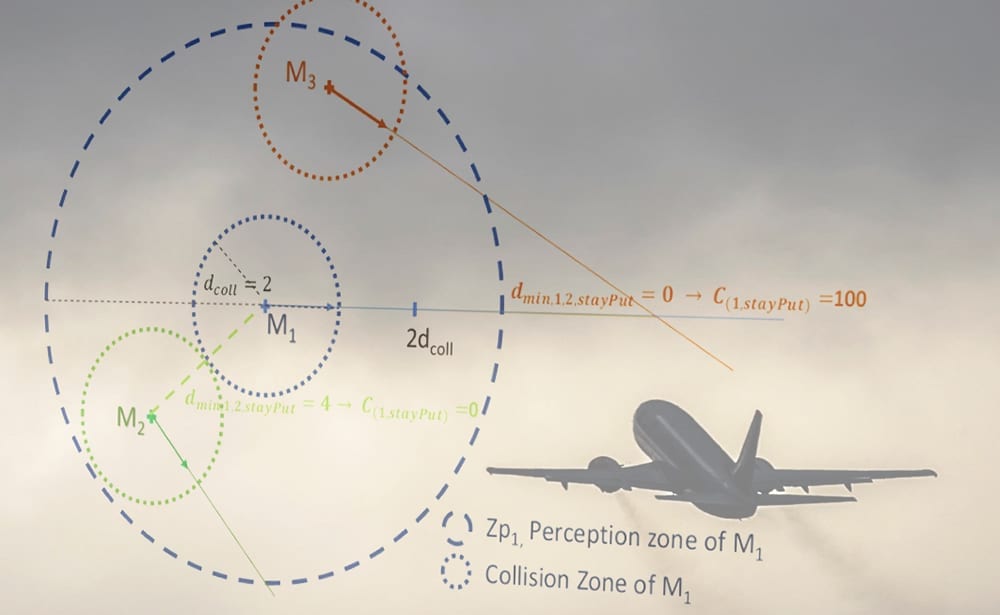
Main notations used in criticalities computation
Addressing the Collision Avoidance Management Problem with a Decentralized (Distributed) Approach
The authors propose to address the collision avoidance management problem using a decentralized and distributed approach known as “the AMAS theory.”
As they note, the AMAs theory “aims at solving problems in dynamic environment by a bottom-up design of autonomous agents, where cooperation is the engine of the self-organization process.”
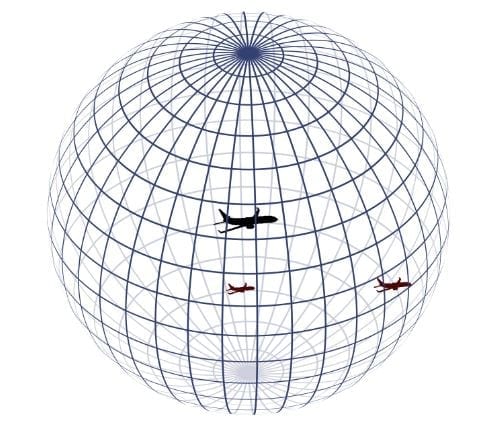
Perception zone of the black airplane (at the center of the sphere),
perceiving two other airplanes
Their AMAs approach has been successfully used to solve different problems, one of which is the anomaly detection in maritime environments, the control and optimization of heat-engine or the context learning.
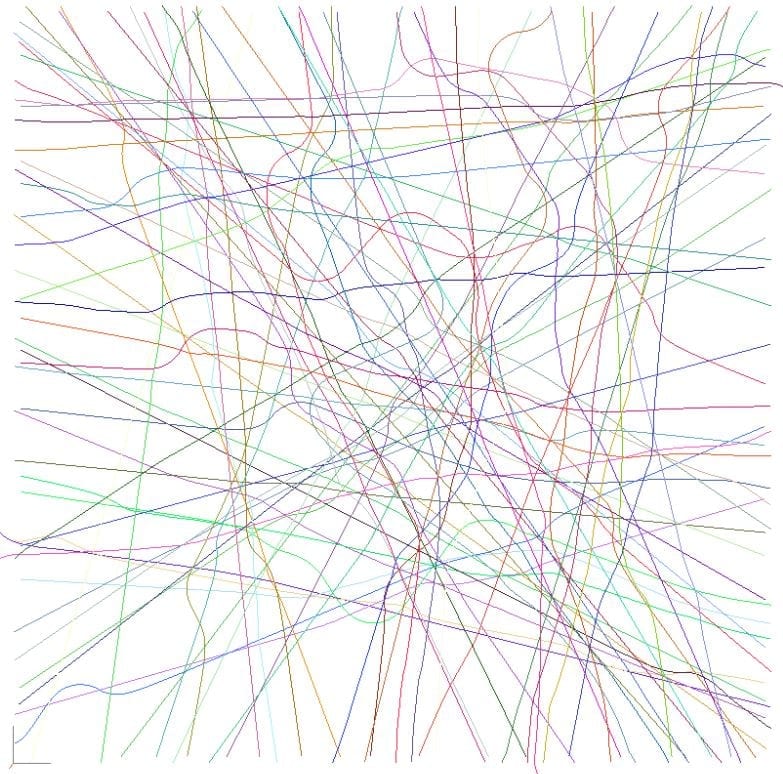
Random experiment with 80 airplanes: 76 arrived and 0 collision
When it comes to collision avoidance, the authors represent each airplane by an autonomous cooperative agent with local interaction, bringing a natural decentralized solution that can be used for simulation, learning as well as on-board practices.
All The Different Theories And Findings
Throughout the article paper, the authors focus on different approaches. From the state-of-art technology that they propose to the Adaptive Multi-Agent Systems Theory, the Collision Avoidance Adaptive Multi-Agent System (CAAMAS) approach and other findings, they evaluate the collision criticality of an action, the trajectory criticality of an action and the final decision on which action to perform.
They further focus on air traffic control, the actions, benchmarks, delays and results. From what the results say, the main acknowledgement comes in the form of a collision avoidance system which is fully decentralized and uses a distributed approach based on adaptive multi-agent technology.
The benefits are numerous, ranging from efficiency of management even for dense traffic, limited amount of communication between airplanes and computation time. On top of this, a system like this could easily be implemented on board, removing any need to rely on ground equipment, according to the authors.
Their plans following these findings, are to test the algorithm in cases where communications are lost – and deeply investigate the evaluation of the Collision Avoidance Adaptive Multi-Agent System – CAAMAS performances.
Citation: Augustin Degas, Arcady Rantrua of Sopra-Steria Group and Elsy Kaddoum, Marie-Pierre Gleizes, Francoise Adreit of IRIT, Universite Toulouse, ‘Dynamic Collision Avoidance using Local Cooperative Airplanes Decisions’, ftp://ftp.irit.fr/IRIT/SMAC/























