
News
Drone-Aided Border Surveillance System with Hybrid Battery Charging
A new paper published by two authors is in the focus of many people following the latest news in the drone world, mainly because it promotes a hybrid battery-charging approach for drone-aided border surveillance scheduling.
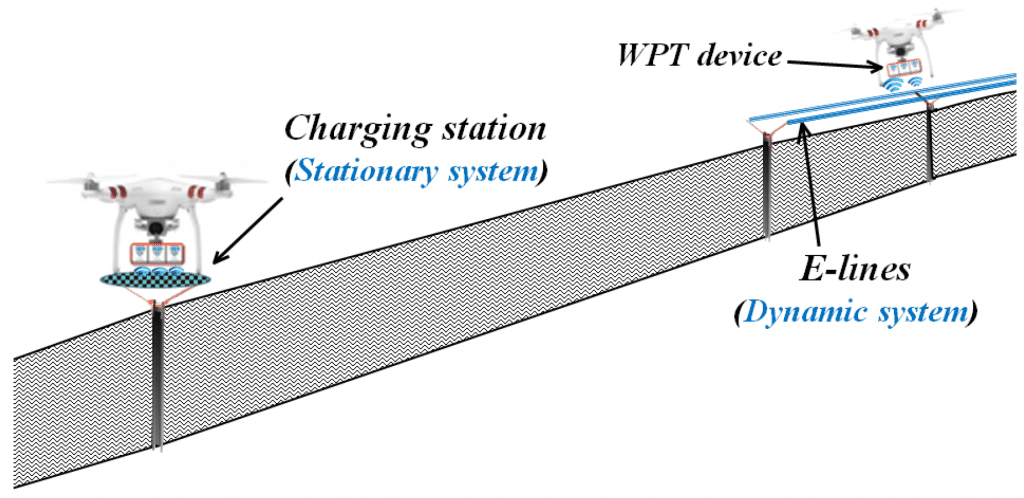
The method actually combines two wireless charging methods – stationary and dynamic charging – into a hybrid mode where the drones must frequently return to a ground control center in order to “replace or recharge” their batteries due to their limited performance.
Stationary Charging Systems for Drones: How Do They Work?
In order to reduce the need of such returning, the authors propose stationary charging systems and dynamic wireless charging systems as part of their plan. Even though there are a few drawbacks of this technology such as the need for stopping on the actual system and the uncertainty of the charging efficacy, the authors also have a plan to resolve the current limitations.
As they state in the abstract of their paper:
“To resolve the current limitations, we propose the hybrid approach for extending drone flight duration in real time. A mathematical formulation model is proposed to decide an optimal installation location and operating time of the hybrid mode. A case study is conducted to illustrate feasibility and effectiveness of the proposed method.”
Their hybrid approach is meant to overcome the issues on wireless charging systems and combine the strengths of both charging systems (stationary and dynamic) allowing for the flight duration to be extended in real time.
By using the hybrid approach of battery charging systems, their main goal is to determine how many systems (SWCS and DWCS) are needed and where they should be installed for drone-aided border surveillance.
So, the main aim of the authors of the paper is to extend the drone’s capability to operate with a hybrid approach, to cope with the uncertainty in the DWCS and reduce the landing time of drones on SWCS – as well as propose a mathematical model that will determine the optimal locations of the wireless charging systems and minimize the total cost of the hybrid systems.
![Air gap in dynamic wireless charging systems (DWCS). (a) E-line systems for drones [2]; (b) E-lane systems for electric vehicles (EVs).](http://dronebelow.com/wp-content/uploads/2018/11/drones-02-00038-g001-1024x365.png)
Air gap in dynamic wireless charging systems (DWCS). (a) E-line systems for drones [2]; (b) E-lane systems for electric vehicles (EVs).
Concept of the hybrid approach.
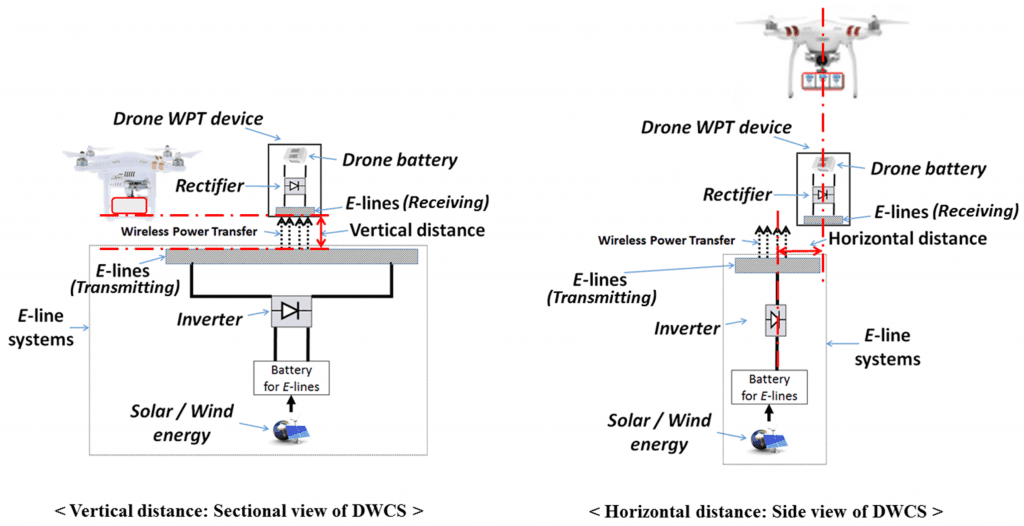
Vertical and horizontal distances between a drone and a dynamic wireless charging system (DWCS).
A New Method to Extend the Flight Capacity of Drones in Real Time
As the authors sum up their resolution to the problem, their paper “proposes a new method to extend the flight capability of drones in real time,” combining two wireless charging methods in a hybrid mode.
“This work is to determine optimal installation and operating time of each system and an optimal flight path for drones while minimizing total operation and installation cost of the hybrid system. For a routine flight mission such as border patrol, drones are deployed to obtain information on suspicious objects. Rotary-wing drones are assumed in this paper. Unlike fixed-wing drones, the rotary-wing drones can be easily controlled to land on the SWCS. The installation cost of each system incurs once, the operation cost of each system incurs per utilization,” the authors stated.
After formulating a specific mathematical model to illustrate the hybrid approach for drones, the authors show that a side objective is to minimize the cost of the hybrid system – including its installation and operation costs.
On top of this, the authors also analyze a case study in the form of a numerical experiment, which according to them, is needed in order to “show how the proposed mathematical model works.” They are explaining the full setup of the case study in detail – through various numerical results and their analysis.

Case study: part of the U.S.- Mexico border in Arizona, U.S.
Results and Conclusions
The results of their numerical study and hybrid model plan is an approach which could extend flight duration of drones flying over border areas – all through a dynamic wireless power transfer – and the hybrid system which consists of DWCS and SWCS as the two main methods.
“Our case study suggested that the hybrid approach had benefits such as reducing landing time on the SWCS (58 min → 22 min) and uncontrolled time for most of the case study area (117 min → 32–63 min) if the efficiency of the DWCS is kept over a certain value (DCE: Uniform (0.2, 0.5)), and extending flight duration (30 min → 32–59 min).”
In summing up, the authors state that the work can be distributed in many ways and be used for different flight speeds of drones when they fly over DWCS in a scaled down system.
Citation: A Hybrid Battery Charging Approach for Drone-Aided Border Surveillance Scheduling, Seon Jin Kim and Gino J. Lim, Drones 2018, 2(4), 38; https://doi.org/10.3390, https://www.mdpi.com/2504-446X/2/4/38/drones2040038

























