News
Semi-Autonomous Robots with Improved 3D Vision for Search & Rescue Missions
Nowadays, search and rescue (SAR) is a general field that refers to emergency responses that locate, give aid, medical care as well as rescue people. Urban SAR, on the other hand, is a term that is used to describe urban environments which are more susceptible to human induced disasters.
SAR Operations Can Benefit from Tele-Operated Robots and Semi-Autonomous Robots
The main aim of their paper is that SAR operations in dangerous, disaster or catastrophe areas can be greatly improved with the assistance of tele-operated robots and/or semi-autonomous robots. Today, the current implementations of mobile robots for SAR operations require human operators to control and guide the robots remotely.
“The first phase in a rescue mission is to identify the target area. The goal is to obtain a precise evaluation of the number and location of victims, detect dangerous situations for rescue personnel or survivors such as gas leaks, live wires, unsafe structures, etc. Semi-autonomous robots carrying correct sensors can obtain data from the field without risks of SAR personnel, and (if connected) can report on line important information,” the authors explain in the paper.
Their particular area of interest are the regions of South Africa and Argentina, which this paper addresses in a joint collaboration. As they explain in the paper, the development and deployment of technology associated with SAR robots also has a direct benefit to people living in poor neighborhoods of South Africa and Argentina, as well as other destinations.
In cases like these, SAR operations can benefit from the aid of semi-autonomous robots, especially in disaster cases such as floods, mudslides, earthquakes, avalanches, fallen buildings, nuclear fusions, explosions, terrorist attacks, forest and/or industrial fires, recovery and deactivation of bombs, etc.
The methodology that the authors propose consists of research, design, simulation, development, assembly and testing of different subsystems for semi-autonomous mobile robots in SAR operations.
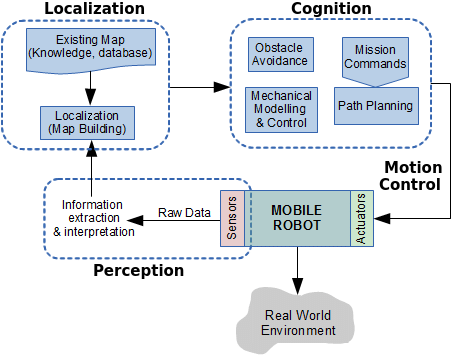
Control structure for autonomous mobile robots
Integrating UAVs Along with Semi-Autonomous Robots in SAR Missions
Thanks to a methodology like this, UAVs can be integrated on board with the semi-autonomous robots in order to deliver first aid kits and equipment, as well as recover the data from the field.
The authors also focus on swarm robotics, which according to them, “consists of a large number of simple and tiny robots working together that perform tasks of greater complexity.” As they explain:
“Swarms are strongly focused in coordination, cooperation and collaboration. In particular for swarm robotics applied to SAR operations, optimization algorithms for hazardous environments and laborious tasks were proposed and development.”
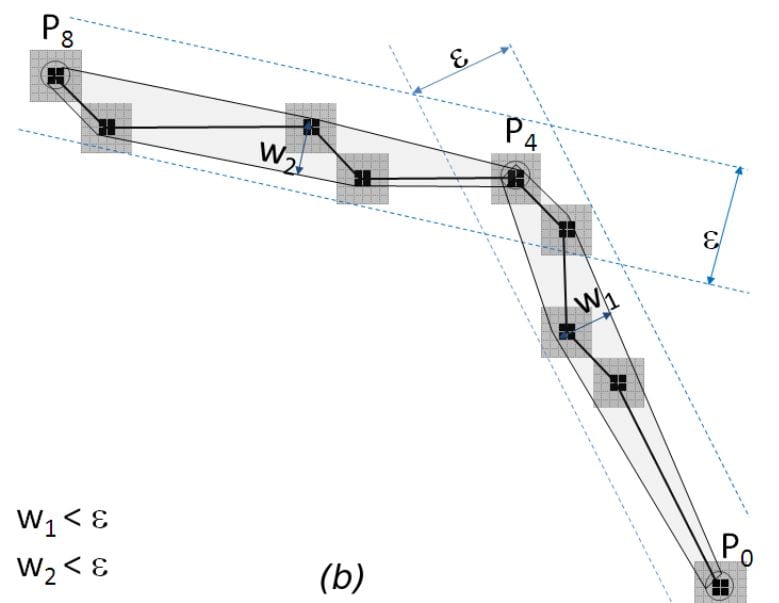
The development of a robust navigation area mapping system for mobile robots, according to the authors, is another very important goal of long-term research. This is why they have set up a couple of building blocks (perception, localization, cognition and motion control) in order to develop a robust navigation area mapping system for unknown and changeable scenarios.
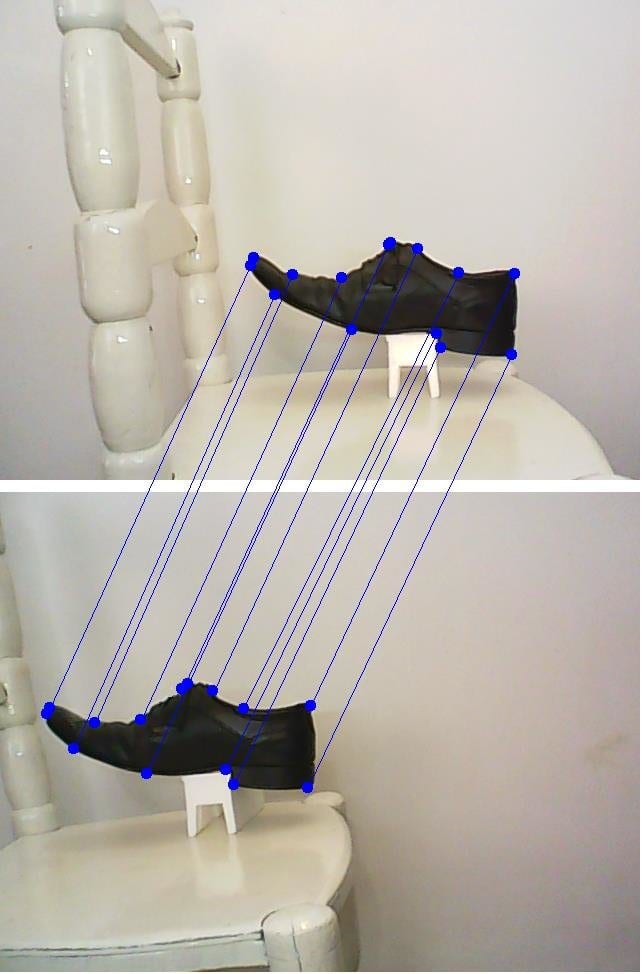
Homologous points of an object in two images.
The Vision-Ware: 3D Vision Algorithms and Hardware Integration
Under the Vision-Ware section, the authors focus on artificial vision technology which is based on a resemblance to human natural vision and follows the analogy of human vision in which each eye receives different luminous stimulus.
As they explain:
“The image obtained in each retina is integrated and reconstructed in the brain that finally generates the perception of the relief. In order to imitate this reconstruction process, given a pair of images (obtained by cameras) called stereoscopic image, it is necessary to solve the following three stages: Calibration, pairing or put in correspondence of homologous points, and 3D reconstruction.”
In order to obtain the three-dimensional reconstruction of an object, they sum up that it is first necessary to find it in both images and pair or find it within the homologous points.
Conclusions
The general conclusions of the paper are that the need and convenience of the development for its later use in SAR missions of various semi-autonomous robots is properly introduced and presented.
Thanks to their research, the authors believe that the research results can definitely relate to future developments, knowledge exchange and active participation in the matter, especially by students in Argentina and South Africa that can benefit from this collaboration.
Citation: Kamlofsky, Jorge & Naidoo, Nicol & Bright, Glen & Lorena Bergamini, aria & Zelasco, Jose & Ansaldo, Francisco & Stopforth, Riaan. (2018). Semi-Autonomous Robot Control System with an improved 3D Vision Scheme for Search and Rescue Missions. A joint research collaboration between South Africa and Argentina. Advances in Science, Technology and Engineering Systems Journal. 3. 10.25046/aj030643. https://www.researchgate.net/publication/329914136_Semi-Autonomous_Robot_Control_System_with_an_improved_3D_Vision_Scheme_for_Search_and_Rescue_Missions_A_joint_research_collaboration_between_South_Africa_and_Argentina

























