News
New Drone-Based Hyperspectral Sensor for Ecological Monitoring
New Drone-Based Hyperspectral Sensor for Ecological Monitoring
Nowadays, hyperspectral remote sensing is known as a process that provides a wealth of data that is essential for vegetation studies that encompass a wide range of applications such as species diversities, ecosystem monitoring and others. Therefore, the development and implementation of a UAV-based hyperspectral systems have gained massive popularity over the last few years with novel efforts to demonstrate their operability. In a new research paper, the authors describe the design, implementation, testing and early results of the UAV-μCASI system which presents a new hyperspectral sensor that is suitable for ecological studies.
As the authors note in the introduction of the paper:
“In an ideal monitoring program, a bottom-up approach that takes into account different spatial, spectral and temporal scales is suggested for consistent Earth observations [1]. Such an approach should provide high fidelity in-situ measurements (i.e., field spectroscopy) that represent the true spatial and spectral variability of the ecosystem under study. These in-situ measurements must complement the wealth of information provided by the airborne hyperspectral data.”
Examining The Altitude Data From The Flight Controller
The researchers also examined the altitude data from the flight controller to better understand the airframe motion and the effectiveness of the integrated Differential Real Time Kinematic (RTK) GNSS, describing important aspects of mission planning and showing the effectiveness of a bundling geocorrection to account for parallax effects at the test site.
While RGB photogrammetry is becoming one of the standard practices in many fields, UAV-hyperspectral remote sensing is still in its early phase of development and is set to become fully operational. Such systems are still expensive and there are many challenges remaining, from battery performance to geocorrection of the imagery derived from the pushbroom systems and other issues.
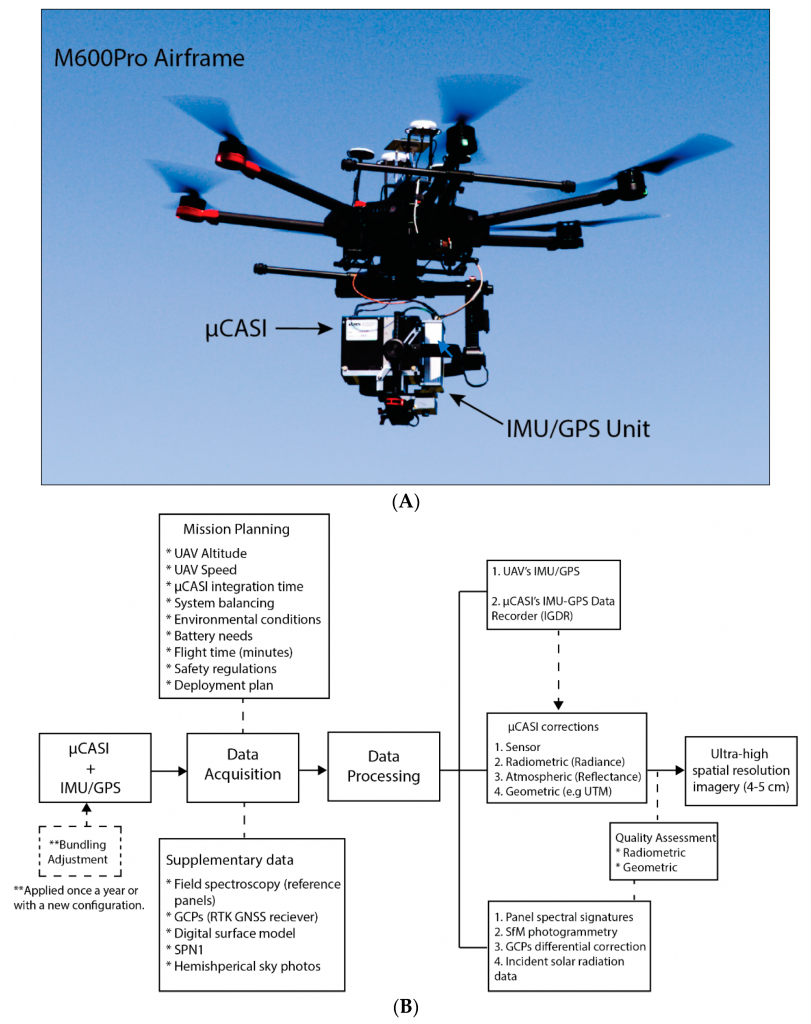
The Matrice 600 Pro airframe with the μCASI hyperspectral imager and custom IMU/GPS mounted on the Ronin MX gimbal. (B) A flowchart showing the system of systems for the UAV-μCASI, including mission planning and data processing aspects described in the following sections. The dotted lines represent inputs to the data acquisition and processes.
Novel And Innovative UAV Hyperspectral System That Uses Various Components For Lightweight UAVs
The paper also introduces a new novel UAV hyperspectral system that is composed of a heavy lift hexacopter and a range of other features. The µCASI is also usable in an airborne platform, presenting a new alternative to other commercial systems that have been previously described in the literature.
With this, the authors are confident of a new innovative UAV hyperspectral system in order to diversify the currently limited availability of options on the market. The system actually uses various components for lightweight UAVs, optimizing the sensor mounting and developing the best configuration to enhance the image quality. Ultimately, the goal of the authors was to reduce sensor motion which in return reduces the image distortion and the percentage of rejected pixels.
From integrating the airframe with the hyperspectral imager to tweaking the IMU-GPS data recorder (IGDR) the authors have worked on developing a system that could be put into practice in different sites.
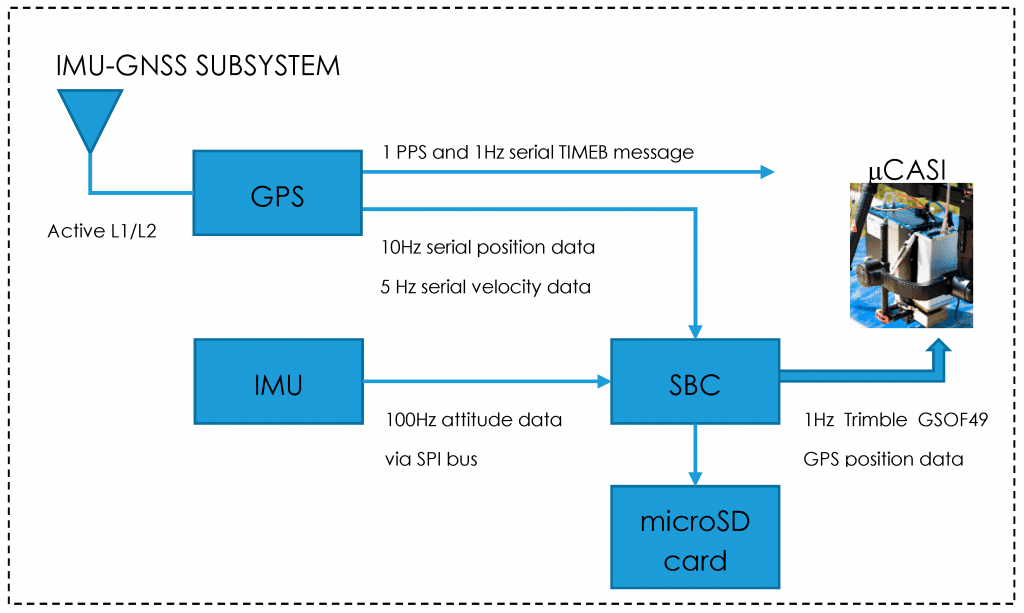
Schematic of the IMU-GNSS data recorder (IGDR) Inertial Navigation System (INS) subsystem components. TIMEB refers to a Novatel GPS message that is logged in a binary format.
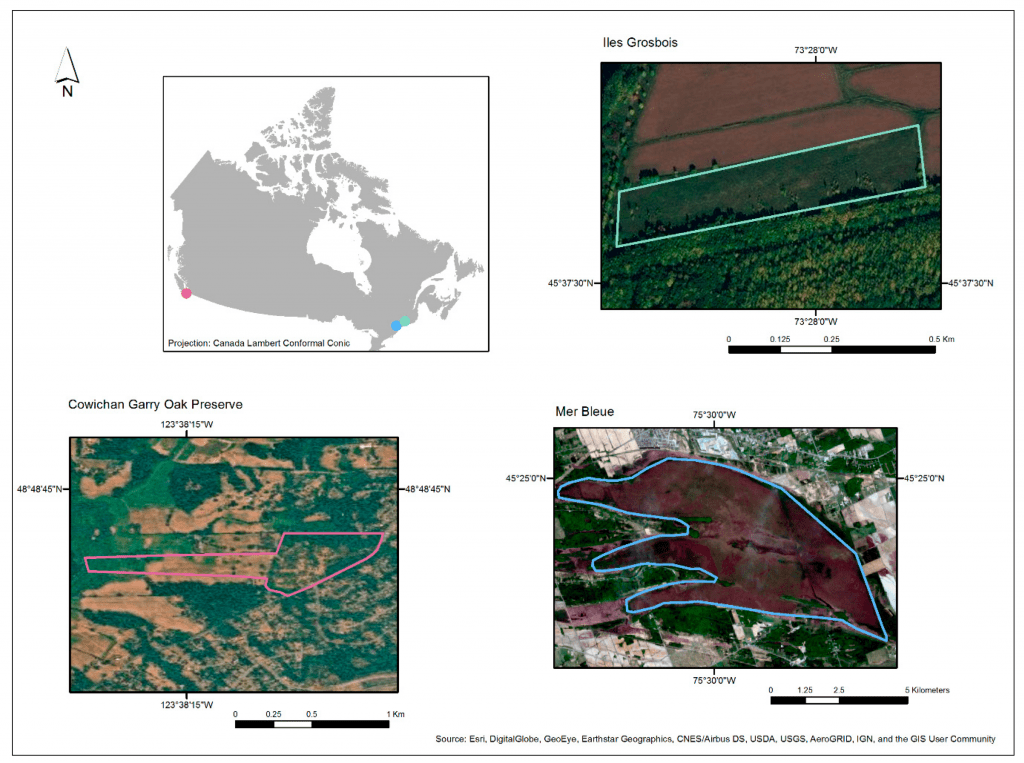
Locations and aerial views of sites selected for testing and data acquisition with the UAV-μCASI system.
Sites, Mission Planning, Data Processing And Testing
There were three sites with distinctive biophysical characteristics and conservation challenges selected for testing the utility of UAV hyperspectral imagery for ecological monitoring. On top of this, the authors planned the mission in every step of the way, uploading the flight plans to the DJI Ground Station Pro (GSP) as waypoint missions.
They also tested the flight speeds, tweaked the IGDR data processing and took into account all of the radiometric, atmospheric and geometric corrections of the system’s imagery.
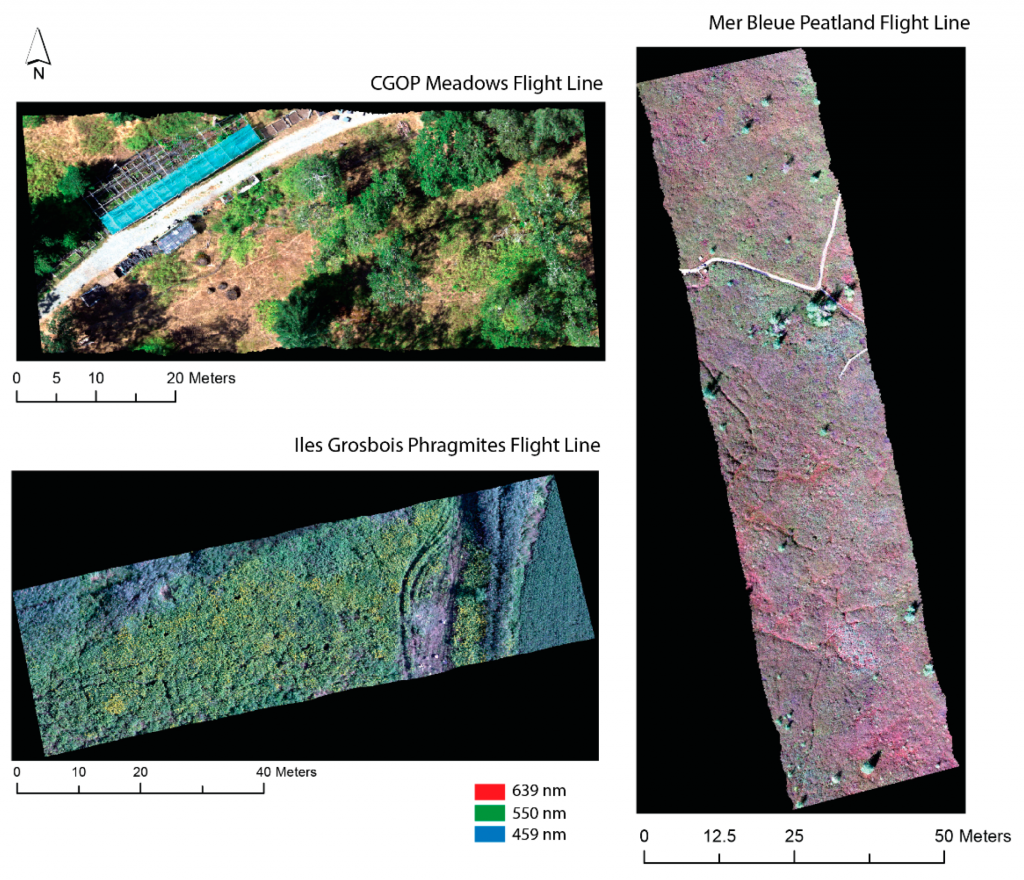
Ultra-high spatial resolution geocorrected hyperspectral images (288 spectral bands) for the study sites from the UAV-μCASI system.

A subset of the SfM-MVS dense 3D point cloud (GSD = 1.28 cm) for the CGOP Meadows flight line. The Spectralon™, Flexispec™ and Permaflect™ panels can be seen in the center of the path, which is the most open area in the flight line. The interactive version of the point cloud can be viewed at the following link: http://bit.ly/CGOP-MD.
Results And Conclusion
The authors expand on many points regarding the results, bringing to the attention of the remote sensing community a new micro hyperspectral sensor which is known under the name UAV-μCASI and has not been previously discussed in the literature.
One of the most notable advances of the system is the demonstration of the radiometric and geometric data quality of this system, which suggests that the imagery from it can be used with a high degree of confidence for research questions requiring spectral fidelity.
“Our hyperspectral system in combination with a custom-built INS with associated processing routines resulted in geocorrected lines with minimal distortion and rejected pixels for three sites with different structural and ecological characteristics: an abandoned agricultural herbaceous field, a Garry Oak forest, and a peatland,” they concluded.
Currently, the system is implemented in the CABO project which is a Canadian effort towards understanding and forecasting how Canadian terrestrial ecosystems adapt to global change drivers.
Citation: Implementation of a UAV–Hyperspectral Pushbroom Imager for Ecological Monitoring, J. Pablo Arroyo-Mora, Margaret Kalacska, Deep Inamdar, Raymond Soffer, Oliver Lucanus, Janine Gorman, Tomas Naprstek, Erica Skye Schaaf, Gabriela Ifimov, Kathryn Elmer and George Leblanc – Drones 2019, 3(1), 12; doi:10.3390/drones3010012 – https://www.mdpi.com/2504-446X/3/1/12/htm