News
A Deep Learning Autonomous Nano-Drone
A team of researchers at ETH Zürich and the University of Bologna and Integrated System Laboratory – ETH Zurich, Switzerland have developed a nano-drone only few centimeters in diameter and miniscule in weight – ideal both for indoor applications where they should safely operate near humans and for highly-populated urban areas, where they can exploit complementary sense-act capabilities to interact with the surroundings (e.g., smart-building, smart-cities, etc.).
Researchers created PULP Dronet, a 27-gram nano-size unmanned aerial vehicle (UAV) with a deep learning-based visual navigation engine. Their mini-drone, presented in a paper pre-published on arxiv, can run aboard an end-to-end, closed-loop visual pipeline for autonomous navigation powered by a state-of-the-art deep learning algorithm.
Quoting information that TechXplore received via email from Daniele Palossi, Francesco Conti and Prof. Luca Benini, the three researchers who carried out the study, who work at a lab led by Prof. Benini,the site reported:
“It is now six years that ETH Zürich and the University of Bologna are fully engaged in a joint-effort project: the parallel ultra-low power platform (PULP), our mission is to develop an open source, highly scalable hardware and software platform to enable energy-efficient computation where the power envelope is of only a few mill watts, such as sensor nodes for the Internet of Things and miniature robots such as nano-drones of a few tens of grams in weight.”
In large and average-size drones, the available power budget and payload enables the exploitation of high-end powerful computational devices and are not a feasible option for miniature robots, which are limited by their size and consequent power restrictions. To overcome these limitations, the team decided to take inspiration from nature, specifically from insects.
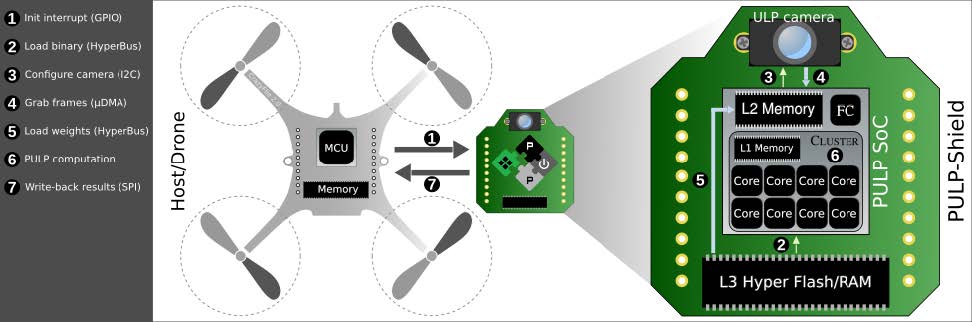
Interaction between the PULP-Shield and the CrazyFlie 2.0 nano-drone
To replicate the energy-saving mechanisms observed in insects, the researchers initially worked on integrating high-level artificial intelligence in the ultra-tiny power envelope of a nano-drone the key goal being a high-performance drone using very little power.
The researchers said that, “Basically, our PULP Dronet can follow a street lane (or something that resembles it, e.g. a corridor), avoiding collisions and braking in case of unexpected obstacles. The real leap provided by our system compared to past pocket-sized flying robots is that all operations necessary to achieve autonomous navigation are executed directly onboard, without any need of a human operator, nor ad-hoc infrastructure (e.g. external cameras or signals) and in particular, without any remote base station used for the computation (e.g., remote laptop).”
In a series of field experiments, the researchers demonstrated that their system is highly responsive and can prevent collisions with unexpected dynamic obstacles up to a flight speed of 1.5 m/s. They also found that their visual navigation engine is capable of fully autonomous indoor navigation on a 113m previously unseen path.
This tiny drone could have numerous immediate applications. For instance, a swarm of PULP-Dronets could help to inspect collapsed buildings after an earthquake, reaching places that are inaccessible to human rescuers in shorter periods of times, thus without putting the lives of operators at risk.
The researchers publicly released all their code, datasets and training networks, which could also inspire other research teams to develop similar systems based on their technology. In their future work, the researchers aim to improve the reliability and intelligence of the onboard navigation engine; targeting new sensors, more sophisticated capabilities and better performance-per-watt.