
News
Analysis of Orthomosaics Derived from Drone Imagery
The advancements in drone technology has revolutionized the production of aerial imagery. Using a drone equipped with associated flight control and image processing applications, it takes just a few hours to produce a high resolution orthorectified mosaic from multiple individual aerial images. However it is crucial to not overlook the positional precision and accuracy of any orthomosaic obtained.
In a project undertaken by researchers a DJI Phantom drone was flown once a month over a seven-month period over Oak Grove Cemetery in Nacogdoches, Texas, USA resulting in seven orthomosaics of the same location to determine positional precision of the orthomosaics.
The research team comprised I-Kuai Hung, Daniel Unger, David Kulhavy and Yanli Zhang from universities Arthur Temple College of Forestry and Agriculture along and the Stephen F. Austin State University USA published their research titled, “Positional Precision Analysis of Orthomosaics Derived from Drone Captured Aerial Imagery,” in MDPI’s open access journal Drones 2019.
Research Aim
Their research attempted to answer the fundamental question, “Are we obtaining the same geographic coordinates for the same feature found on every aerial image mosaic captured by a drone over time?”
The team identified 30 ground control points (GCPs) based on permanent features in the cemetery and recorded the geographic coordinates of each GCP on each of the seven orthomosaics. Analyzing the cluster of each GCP containing seven coincident positions depicts the positional precision of the orthomosaics.
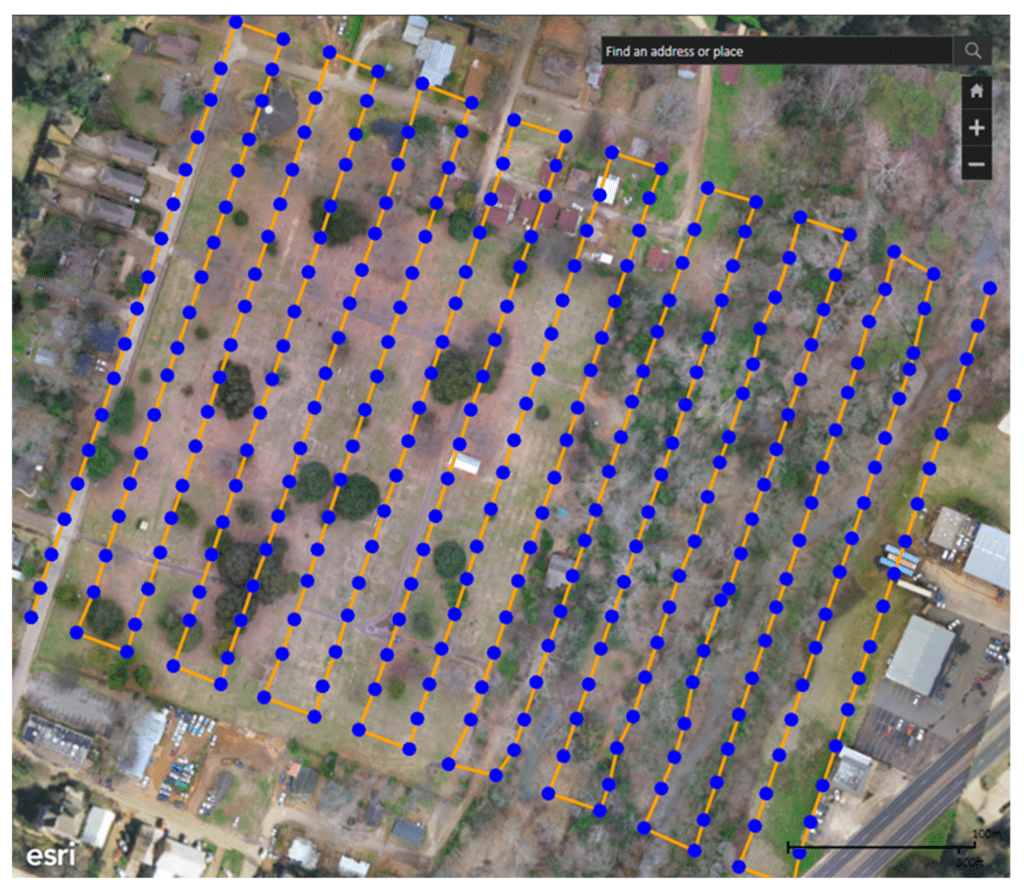
Map identifying the center location of each drone image acquired on 7 September 2017 and the corresponding drone flight path.
Material used
3 to 4 DJI Phantom drones were flown over the study area monthly from September 2017 to March 2018. Each drone mission took an average flight time of 17 minutes, resulting in an average of 306 photos covering a total area of 11.7 ha (28.9 ac). Each drone flight was planned to fly outside the boundaries of the cemetery to ensure any resulting orthomosaic produced from each drone flight would completely contain the physical boundaries of the entire cemetery. After completion of each drone mission, images acquired by the drone were imported into Drone2Map to create an orthomosaic. In order to assess the precision of positions, 30 ground control points were selected throughout the cemetery based on the 7 September 2017 orthomosaic.

Orthomosaic of the September 7, 2017 imagery where each of the 30 ground control points (GCPs) is represented as a red cross.
The seven flights programmed with Pix4DCapture each resulted images that were processed with Drone2Map. It created a series of georectified images that could be compared month to month based on set GCPs.
Conclusions
In an orthomosaic derived from drone captured aerial imagery, the center of the orthomosaic had higher positional precision than areas along the edges. When relying on the orthomosaic for any feature measurement to derive real-world units, caution should be taken to not only identify where in the mosaic aerial photo measurement will be the most accurate, but also the direction of the measurement. Other factors that could also play a role affecting the positional precision of any derived orthomosaic could include drone GPS accuracy, camera resolution, image processing application used, and wind speed and wind direction during the drone flight.
The study recommends flying a drone mission covering an area beyond the physical boundary of the study area in question to produce an orthomosaic with the highest precision and accuracy attainable per flight.
Funding & Acknowledgements
This work was supported by McIntire Stennis Capacity grant from the USDA National Institute of Food and Agriculture. The researchers thank the GIS Lab in the Arthur Temple College of Forestry and Agriculture at Stephen F. Austin State University for their technical supports.
Citation: Positional Precision Analysis of Orthomosaics Derived from Drone Captured Aerial Imagery, I-Kuai Hung, Daniel Unger, David Kulhavy and Yanli Zhang, Drones 2019, 3(2), 46; https://doi.org/10.3390/drones3020046 – https://www.mdpi.com/2504-446X/3/2/46/htm


















