
News
A Neural Network Based Approach for Object Detection from UAV
Object and UAV’s (Unmanned Aerial Vehicles), the two terminologies almost go hand in hand with each other. Ever since UAV’s were popularized by American military, especially in the US headquarters situated in Afghanistan, the smart autonomous methods of targeting and maneuvering of UAV’s and drones has been a hot topic. The US drones would take off and follow a programmed, set path as per the satellite guided GPS system, detecting objects in their way and avoiding them accordingly and most importantly, detecting their target after reaching their destination and hitting the target with an incredible accuracy and precision.
With the expanding scope of applications of UAV’s, the scope of image tracking and object detection expands exponentially. Specifically, one-stage object detector and two-stage object detector are regarded as the most important two groups of convolutional Neural Network based object detection methods. One-stage object detector could usually outperform two-stage object detector in speed; however, it normally trails in detection accuracy, compared with two-stage object detectors, meaning that there is almost always a trade-off to be optimized depending upon the application where the object detector is used.
The said tradeoff is tackled with different methodologies attempting to enjoy the benefits and avoid the cons of both one stage and multi stage object detectors. Recently, Convolutional Neural Network (CNN) has been proved to be a promising approach for feature extraction of Region of Interest in images. There are many CNN based methods, which have been proposed for object detection and classification from UAVs. Nonetheless, superior detection accuracy and low processing time latency could hardly be achieved at the same time with CNN.
A very recent study titled “Fast and Accurate, Convolutional Neural Network Based Approach for Object Detection from UAV” was published by Xiaoliang Wang, Peng Cheng, Xinchuan Liu, Benedict Uzochukwu; each from Department of Technology College of Engineering and Technology Virginia State University in the US. The study was aimed at the usage of RetinaNet to achieve the benefits of both single stage and double stage object detectors with the same object detector.
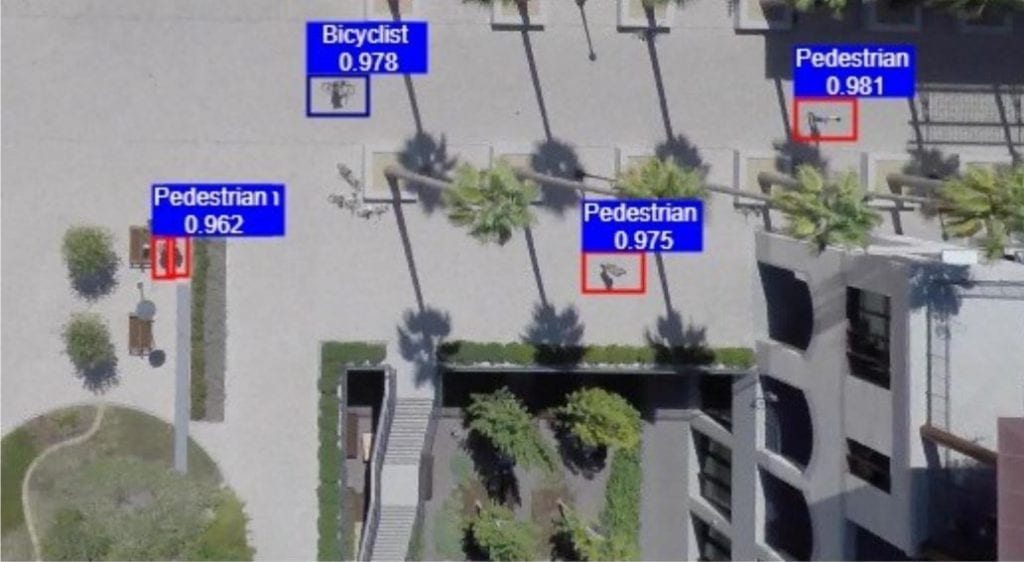
RetinaNet based Object Detection Result on the Stanford Drone Dataset
In this study, they deployed a Focal Loss Convolutional Neural Network based object detection method, which happens to be a type of one stage object detector – RetinaNet, to undertake the object detection task for the Stanford Drone Dataset (SDD). Their experimental result show that the RetinaNet could be well adjusted to perform faster and more accurate object detections compared to previous other methods. RetinaNet just might be a fair, safely optimal trade-off between the speed and accuracy of one stage and two stage object detectors; using it, in very simple words is like ‘eating your cake and having it’.
State-of-the-art performance result has been demonstrated on the UAV captured image dataset-Stanford Drone Dataset (SDD).
Results
The results of this study, well they speak for themselves, identifying pedestrians in the parking lot of a skyscraper with an extremely high precision, accuracy as well as location tracking.
Reference: Fast and Accurate, Convolutional Neural Network Based Approach for Object Detection from UAV. Xiaoliang Wang, Peng Cheng, Xinchuan Liu, Benedict Uzochukwu arXiv:1808.05756 [cs.CV] https://arxiv.org/abs/1808.05756

























