News
Optimizing Terrain Following for Fixed-Wing UAVs
Optimizing Terrain Following for Fixed-Wing UAVs
Nowadays, unmanned aerial vehicles are known for their wide spectrum of commercial applications that range from wildlife observation, infrastructure monitoring, meteorological measurements as well as aerial surveillance and photography.
Solving the Problem of Monitoring UAVs in Non-Flat Surfaces
A new paper published by two authors in Ming Hiesh Department of Electrical Engineering at the University of Southern California, Los Angeles discusses a model that could potentially solve the problem and provide a feedback controller in a way that the resulting closed-loop system follows a given reference surface or terrain.
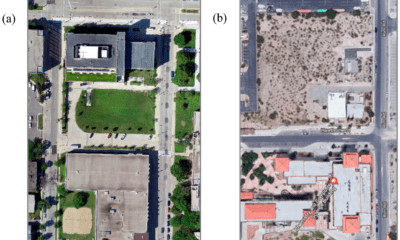
For example, if the operator wants to manually command the UAV (drone) on a non-flat surface (in mountain and forecasts areas), and obtain aerial photography, a constant resolution of the obtained image can be only maintained if the UAV is actually following the shape of the surface. However, knowing that manual control of the UAV is rather difficult for any human operator – this paper aims on a system that can optimize the terrain following for all fixed-wing UAVs and therefore reduce the complexity of monitoring these devices across flat surfaces.
The paper focuses on fixed-wing UAVs and aims to achieve the desired reduction in complexity by introducing a system that will use a specific approach to the controller design for the terrain following of UAVs. The approach makes use of pivotal contribution of the dynamical equations expressed in a new state space.
Several Methods Proposed for Different Classes of Paths
Even though the paper may sound too complex for many to understand, it definitely tackles a problem that is present and arising in context of the unmanned vehicles present nowadays. Therefore, several methods have been proposed for different classes of paths. From curved paths to straight paths and straight line paths, the methods are mainly backed by the fact that straight line tracking controller design is simpler for every dynamical system out there.
To sum the research and findings from the paper, it actually concludes with a method that could be fully developed and one that will likely reduce the controller design for the terrain following of UAVs to following flat surfaces.
As the paper reads:
“Initially, we introduced an arbitrary coordinate transformation of the UAV’s physical space, analyzed how it is extended to the entire state space and proved that, under an appropriately chosen input transformation, the dynamical equations of the UAV are invariant. This property was subsequently exploited by using the reference terrain as a basis for constructing the aforementioned coordinate transformation.
The terrain was projected to a flat surface, extended to infinity and shifted along a chosen vector. Conditions for invertibility were extracted and the inverse transformation was obtained.
Simulation results for two different terrains and two different controllers were presented. Potential future research directions is to provide conditions on the dynamical equations such that they remain invariant and to explore different methods for constructing these transformations.”
Further Research is Needed
Further research on the topic of terrain monitoring for fixed-wing drones is definitely needed. However, the authors believe that this paper can be a great starting point for developing this method further and making it a backbone of a new type of technology.
What the authors also conclude is the fact that the method’s performance does not actually depend on the complexity of the reference terrain or the path to be followed on the canonical plane. This is what the ‘breakthrough’ discovery is in terms of this paper – and how it could be deployed in today’s UAV systems.
Citation: “Terrain Following for Fixed-Wing Unmanned Aerial Vehicles Using Feedback Equivalence,” by P. Kyriakis and G. Moustris, in IEEE Control Systems Letters, vol. 3, no. 1, pp. 150-155, Jan. 2019. doi: 10.1109/LCSYS.2018.2854239 | URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8408539&isnumber=8410052