AI
Tiny Overseer’s System for Autonomous and Low-Altitude Missions
In a world full of new thesis centering around today’s technology, Tiny Overseer seems to direct a new system that is based on commercial quadcopter drones – giving them the ability to perform autonomous unmanned missions.
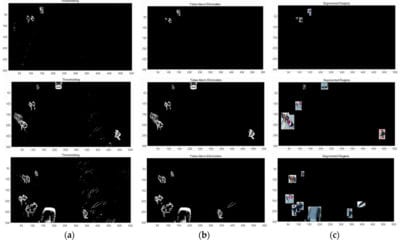
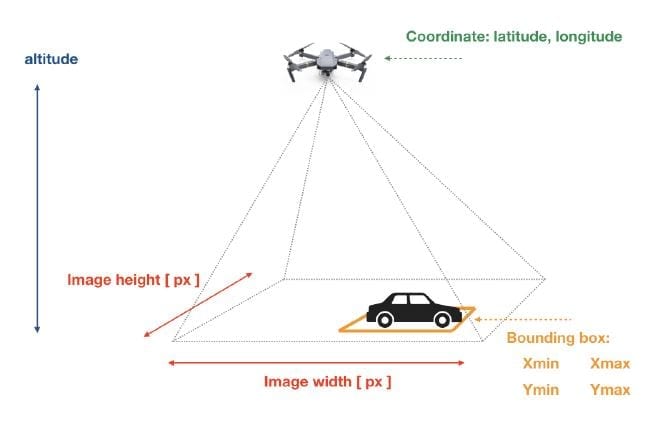
The system will use a state-of-the-art object detection network that will emphasize on SSD – with a goal of performing surveillance and inspection over certain areas of interest. As such, it will feature a drone which will stream video and other sensor data in real-time to an external server that performs inference using neural network – as well as predict the geolocation of a specific and detected target.
The Author, Thesis and Planned System
Bjarte Sjursen is behind this thesis, as a student at Computer Science at the Norwegian University of Science and Technology. He used the DJI Maverick Pro to conduct this thesis and come up with the results.
The goal of his project was to create a system that will handle motoric actions performed by the drone and gather information through sensors, creating a model of the environment that is related to the task at hand.
Sjursen also studied the possibility of using an affordable and commercial drone for autonomous flights as well as the right infrastructure that can enable real-time autonomy. He studied the deep learning mechanisms for surveillance and inspection – and mapped perceived objects to global coordinates using a commercial drone.
A Brief Outline on the Thesis
While the entire thesis and project can be seen here, the author also outlines the main organization on the paper from the start. In the introduction chapter, he presents an overview of the questions that will be answered – as well as a description of the problems at hand.
In the second part, Sjursen is giving some background on the different technologies used throughout his project – from the computer issues to the software actually controlling the drone. In the third part, Sjursen presents the architecture for the system and in the fifth part, presents his results from the executed experiments.
The last two parts are where Sjurnsen gives the final suggestions for future work.

The main screen of the user interface. The video view is shown in the bottom right corner. The yellow drone icon denotes the current position of the drone.

A mission created for the drone based on a designated area.
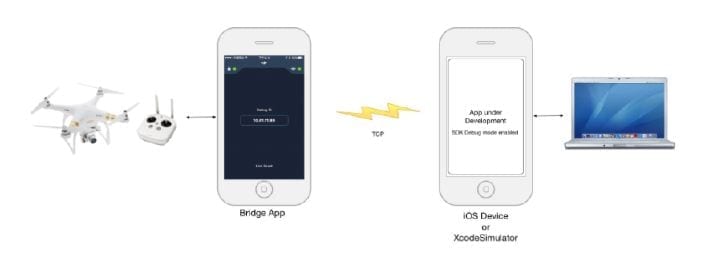
The work flow when the Bridge SDK app is connected.
Methods and Implementation of the Technology
From image processing to actual frameworks, projections and estimates, the author of this thesis goes in detail when it comes to the potential use of drones for such surveillance. His methods and implementation of the technology aim at creating an autonomous quadcopter system that will have real-time analytic functionalities for use in inspection and surveillance.
Sjursen also covers the client architecture and the responsibilities of clients in missions like these – which will mainly focus on controlling the drone, extracting relevant data and planning the scope of the missions.
According to the paper:
“Graphical interfaces are natural starting points for development. The main GUI component of the client application is a map view used to steer the drone to different geographical coordinates. The map is used to select waypoints and also mark areas to cover to initiate missions.
Enabling the drone to talk to the client was the second part of the process. We performed this by calling functions in the DJISDK Manager part of the API.
Mission operator implementation enabled the client to push control commands to the drone – which has been materialized by implementing various protocols provided by DJI.”
Final Words
In the end,the thesis written by Sjursen proves one thing – that commercial drones are capable of being fully autonomous in surveillance and inspection missions. The testing confirms that, just like it confirms the network communication platform and its great use.
So, the key takeaway is that this platform can definitely serve as a foundation for a wide range of autonomous tasks.
Citation: Tiny Overseer – A System for Autonomous Low-Altitude Missions, Bjarte Sjursen, Norwegian University of Science and Technology – https://brage.bibsys.no/xmlui/handle/11250/2566505