
News
Optimizing Remote Drone Clusters
Optimizing Remote Drone Clusters
UAVs and drones have recently gained a lot of popularity in commercial and research prospects primarily due to the benefit in their functionality in terms of mobility, speed, accessibility, economy and convenience; however, drones have certain limitations that are subject to rigorous research. Of problems like legal and privacy issues associated with drones and the problem of cyber-security of the drone system, the most obvious problem that affects drones and UAV systems is the small battery life of a drone, affecting its flight time and reducing its load carrying-capacity significantly.
The affects of limited battery in drones and small aircrafts span to limiting the processing power of controllers or computational systems installed in a drone as controllers and processors that are faster and more powerful at receiving, processing and transferring data generally require more electrical power.
Problem Analysis
The insufficient computing setups that can be installed on a UAV can be accounted for by using a computational offloading technique to a Ground Control Station (GCS) that is conveniently located with respect to the drone. An alternative to this approach is offloading the processing tasks to neighboring drones that are collectively equipped with enough computational resources for a given task.
There is, however, a problem in this potential solution. A single GCS can not operate for a large number of drones. The number of drones that can mutually use a GCS at a time is limited since the GCS can be overloaded with too much processing task, causing a much longer response time for executing an application.
Obviously, this bottlenecking of GCS can be resolved by using more power GCSs but the primary reason why drones are so effective is their mobility. Drone operation is often required in remote areas lacking in network infrastructure that affects the data transfer rate between the drones and the GCS. GCSs also have operational difficulties in disaster situations or military areas.
Inter-Cluster Computation
To address the above mentioned problems related to drone processing, the authors of the research article, “A Design and Simulation of the Opportunistic Computation Offloading with Learning-Based Prediction for Unmanned Aerial Vehicle (UAV) Clustering Networks“, propose the idea of offloading between drones and a GCS, in parallel with offloading between different clusters of drones.
A cluster of UAVs that needs higher computational power that what is available on the processor or computer mounted on it, can borrow this power from a GCS or from another cluster of UAVs in case the GCS is concentrated with processing task.
The system excellently answers the problem of lack of network infrastructure in remote areas or disaster sites by using moving clusters of drones as airborne computers that do not require a connection with a GCS on the ground.
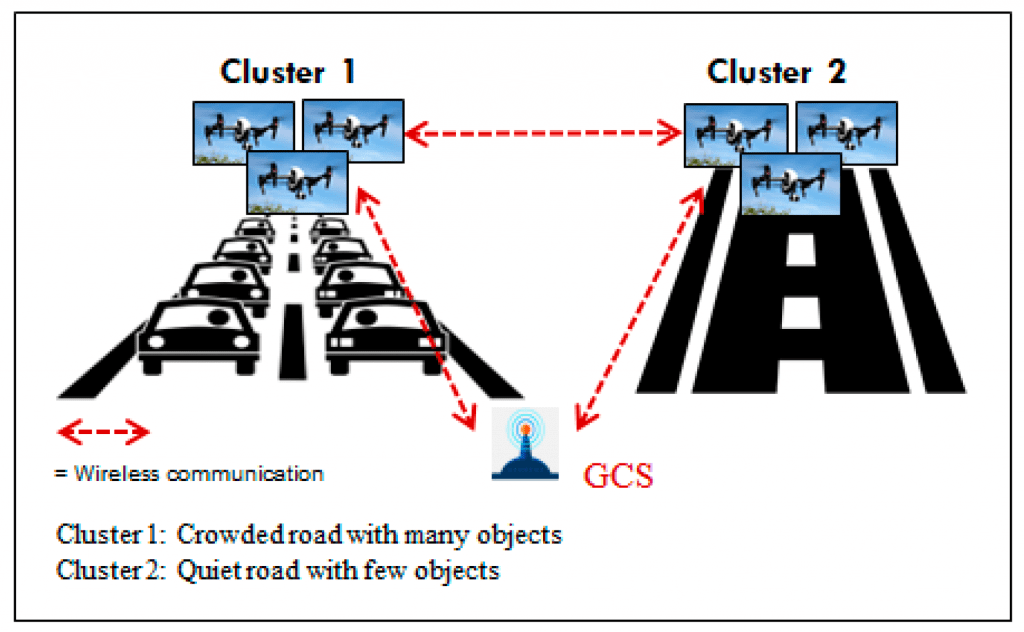
Drone clusters with identical service but different environmental conditions. GCS: Ground Control Station.
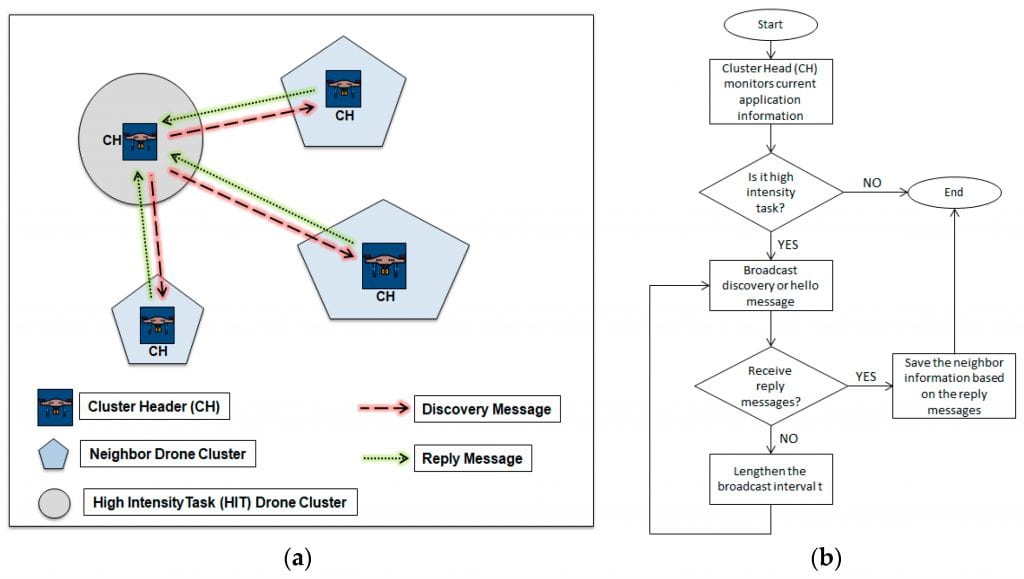
(a) Cluster discovery scenario and (b) Flowchart of cluster discovery process.
Working of Inter-Cluster Computation
- There is a head drone in each cluster of drones. The head is responsible for identifying the presence of nearby drone clusters as well as communicating data to the clusters that have computational resources available for use.
- The cluster head, after identifying nearby clusters that can be used for processing, analyzes the cluster that requires the least time to send the processed data back to the cluster head. The most suitable cluster for offloading data is decided on the basis of this response time as well as some other parameters like available computational power, bandwidth of the wireless network, application input size and the computational power required for executing the application.
- The decision criteria for the head of the cluster is continuously improved by adoption of machine learning techniques that improve the accuracy of decision essentially by improving the accuracy and precision of the estimation algorithm that predicts response time.
When the cluster head has calculated all required parameters, it decides whether it would be faster and more convenient to compute the data locally on the processors mounted on its own cluster of drones or if it would be preferable to offload computational tasks to nearby clusters. If the estimated response time of offloading computational tasks exceeds the predicted time it would take to compute the task locally, the cluster head processes data within its own cluster. Otherwise, the task is offloaded to the most convenient cluster.
Citation: Rico Valentino, Woo-Sung Jung and Young-Bae Ko, A Design and Simulation of the Opportunistic Computation Offloading with Learning-Based Prediction for Unmanned Aerial Vehicle (UAV) Clustering Networks, Sensors 2018, 18(11), 3751; doi:10.3390/s18113751, https://www.mdpi.com/1424-8220/18/11/3751/htm

























