
News
Neural Network Provides Stable Drone Landing
Unmanned Aerial Vehicles (UAVs) require high precision control of aircraft positioning, especially during landing and take-off. This problem is challenging largely due to complex
interactions of rotor airflows with the ground.
The aerospace community has long identified the change in aerodynamic forces when helicopters or aircraft fly close to the ground. Such ground effects cause an increased lift force and a reduced
aerodynamic drag, which can be both helpful and disruptive in flight stability, and the complications are exacerbated with multiple rotors. Therefore, performing automatic landing
of UAVs is risk-prone, and requires expensive high-precision sensors as well as carefully designed controllers.
To address the problem of compensation and accounting of ground effects, a research article titled, “Neural Lander: Stable Drone Landing Control using Learned Dynamics” published on arxiv.org proposes using a novel deep-learning-based robust nonlinear controller (Neural-Lander) that improves control performance of a quadrotor during landing. Describing their approach, the authors comment, “Our approach blends together a nominal dynamics model coupled with a Deep Neural Network (DNN) that learns the high-order interactions.”
What is a Deep Neural Network?
A neural network, in general, is a technology built to simulate the activity of the human brain – specifically, pattern recognition and the passage of input through various layers of simulated neural connections. Deep Neural Networks are networks that have an input layer, an output layer and at least one hidden layer in between.
Integration of DNN in UAV Systems
The researchers trying to solve the problem of addressing the problems caused by ground-effects aim to use Machine Learning based on DNN. But it is not a very simple task due to several reasons:
- First, DNNs are notoriously data-hungry and it is challenging to collect sufficient real-world training data.
- Second, due to high-dimensionality, DNNs can be unstable and generate unpredictable output, which makes the system susceptible to instability in the feedback control loop.
- Third, DNNs are often difficult to analyze, which makes it difficult to design provably stable DNN-based controllers.
There are a number of “solutions” around this difficulty restricting the usage of DNNs but most of these solutions, while viable, are not feasible for convenient usage and application as they often require power and processing intensive optimization calculations. The researchers formulate a solution around this problem while keeping their proposed, finalized system feasible for usage. Describing their solution, they write, “Our approach directly learns the ground effect on coupled unsteady aerodynamics and vehicular dynamics. We use deep learning for system ID of residual dynamics and then integrate it with nonlinear feedback linearization control. We train DNNs with spectral normalization of layerwise weight matrices.”
This procedure or formulation is packaged in a single learning-based controller, Neural-Lander, designed to improve the precision of quadrotor landing with guaranteed stability.

Intel Aero drone during experiments
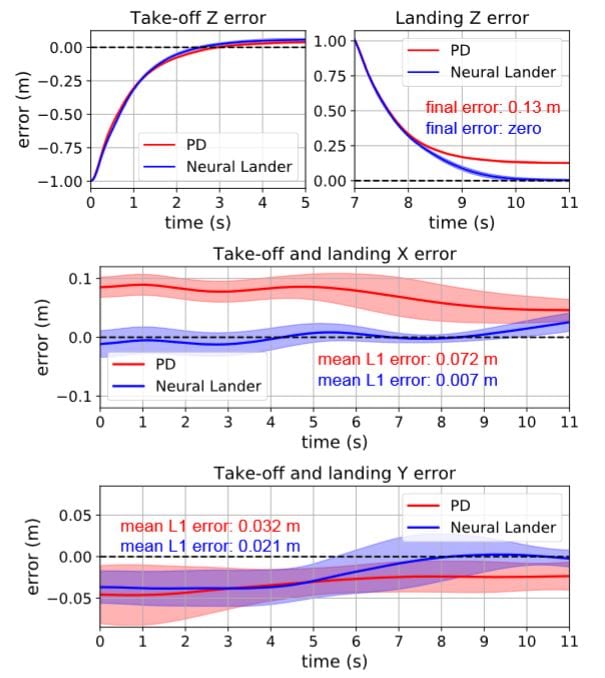
PD and Neural-Lander performance in 1D take-off and landing. Means (solid curves) and standard deviations (shaded areas) of 10 trajectories.
Neural Lander
The main benefits of our Neural-Lander are:
- In both single dimensional and 3 dimensional cases, Neural-Lander can control the drone to precisely land on the ground surface while the baseline controller cannot land due to the ground effect.
- In both single dimensional and 3 dimensional cases, Neural- Lander could mitigate drifts in the horizontal and vertical directions, as it also learned about non-dominant aerodynamics such as air drag.
Based on bench tests as well as ground experiments, it was confirmed that the Neural-Lander is able to significantly improve control performance of robotic aircrafts. Neural-Lander’s main benefits were self-learning from coupled unsteady aerodynamics and vehicle dynamics, and more accurate estimates than theoretical ground effect models. Neural-Lander can capture both the ground effect and the nondominant aerodynamics, and outperforms the conventional controller in all directions. Future work might include further generalization of the capabilities of Neural-Lander handling unseen state and disturbance domains even generated by a wind fan array.
Citation: Neural Lander: Stable Drone Landing Control using Learned Dynamics, Guanya Shi, Xichen Shi, Michael O’Connell, Rose Yu, Kamyar Azizzadenesheli, Animashree Anandkumar, Yisong Yue, Soon-Jo Chung, arXiv:1811.08027v1 [cs.RO], https://arxiv.org/abs/1811.08027

























