News
A Drone Controlled with the Help of a Neural Network
Artificial Intelligence is being harnessed in varied projects to form the basis of higher degree of autonomy for UAVs and drones- even drone racing for example. First-person-view drone racing is gaining popularity among technology enthusiasts with competitive races are being held globally. One such chance drone enthusiast William Koch a passionate drone racer and a Boston University computer scientist, has developed a machine-learning-enabled quadcopter drone controller that could advance technology for AI-controlled vehicles. Koch and a team of collaborators built Neuroflight—the first drone flight controller software powered by machine learning—to optimize flight performance.
Koch and his faculty advisor Azer Bestavros, founding director of the Hariri Institute and senior author on the team’s first public paper describing Neuroflight looked into research at the intersection of drones and artificial intelligence, Koch and Bestavros learned that General Electric and other industry titans were aggressively pursuing technology in that space.
“Wil and I confirmed the value and potential of this line of work, thinking about control of autonomous vehicles and how you might use AI and machine learning to do that,” says Bestavros, adding further, “Just like the progression of technology in Formula 1 racing has created technologies we see in our own vehicles.”
Currently, drones and most other remote-controlled vehicles are operated through linear controllers that can’t adapt to changing conditions. A typical quadcopter uses a conventional controller—known as a proportional integral derivative, or PID, controller in that allows the operator to give the drone commands to move in a certain direction and velocity by moving the controller’s joysticks. This current controller technology however lacks the inherent ability to adapt to changing conditions, like higher winds or even the loss of a propeller.
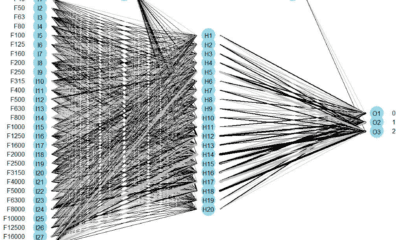
A drone outfitted with a Neuroflight controller utilizes a trained neural network to maneuver through dynamic environmental conditions like wind. Koch explains that the Neuroflight controller is trained in computer simulation to adapt to a wide range of different events, correcting the drone’s position inside a dynamic and changing, albeit digital, environment. After simulation training, the “educated” neural network goes to work in the real world by sending signals to the drone motors, telling them how to respond so that the quadcopter moves in the exact way that its operator intends.
“PID is a linear control system, but the environment is nonlinear,” says Koch adding, “We’re ripping out that PID controller and dropping in a trained neural network.”
After three months of experimental computer simulation, Neuroflight took to the skies on its maiden voyage in November 2018, a milestone for the world’s first machine-learning-optimized drone controller. The drone racing community is enthused.
To take Neuroflight to the next level, Koch is working on building a digital twin of his racing drone. Using his CAD software skills Koch seeks to build 3D models and assemble his drone’s components in a computer-simulation environment. The continuing work, Koch and Bestavros say, will showcase the true benefits of using machine learning for control, improving effectiveness in the face of uncertainty.