News
Bioinspired Morphing Applications for Rudderless UAVs
The field of morphing – to seamlessly alter aircraft geometry for multi-mission or adaptive fly-by-feel flights is one of the most interesting domains of research lately. Thanks to the benefits of tailored aerodynamics, an aircraft no longer needs to be designed in order to suit a single cruise flight condition.
Examining the Morphing Applications for Rudderless UAVs
According to Lawren Gamble and his study on bioinspired control of rudderless morphing UAVs, the main aim of the research is to investigate the morphing applications for rudderless UAVs which haven’t been studied prior to this point in detail.
“The primary objective of this research is to investigate morphing applications for rudderless UAVs, which have seldom been studied prior to this point, through bioinspiration. As natural fliers undergo multi-scale low-altitude morphing to adapt to changes in either flight objective or aerodynamic conditions, they are prime subjects for investigation. This is accomplished through both analytical aerodynamic modeling, and experimental design and investigation of novel morphing actuators using MFCs.”
The author uses bioinspiration as his main method for examining this control, all through both analytical aerodynamic modeling as well as experimental design and investigation of novel morphing actuators using Macro Fiber Composites (MFCs).
Justifying the Need for Morphing Technologies
The research is also aimed at justifying the need for morphing technologies – especially at the UAV scale by assessing the impact of the winds velocity and direction. More specifically, both steady wind and quasi-steady sharp edge cross wind are assessed in order to characterize the response.
In the paper, the author has also developed a nonlinear Lifting Line Theory (LLT) model which is aimed at spanwise morphing aircraft – through which a morphing wing can be tailored and optimized to achieve a desired aerodynamic outcome.
Since the model is capable of characterizing nonlinear applications, the spanise wing geometry is also in play – tailored in order to recover from stall. The author goes through a lot of analyses, methods and possible adaptation scenarios in an attempt to characterize the limitations of the system.
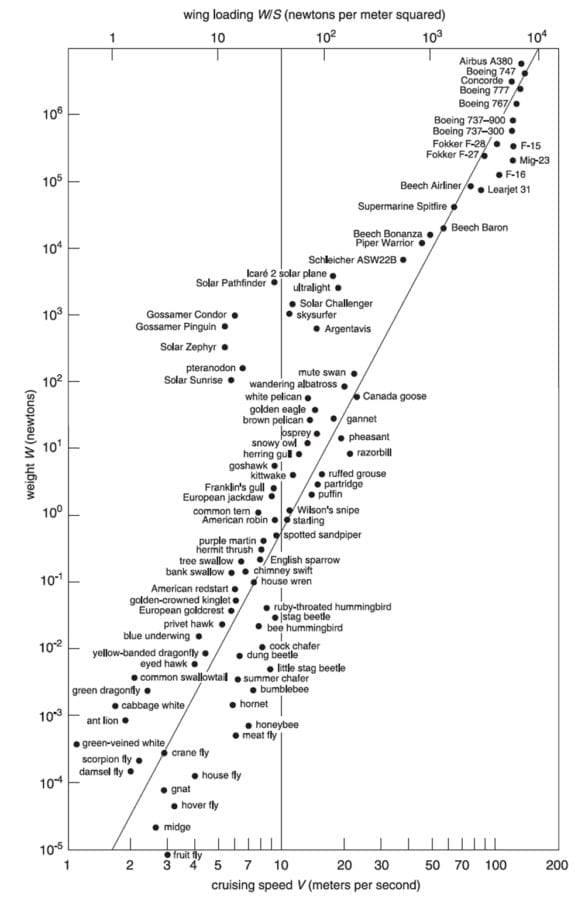
Observed relationship between flight speed and flier size
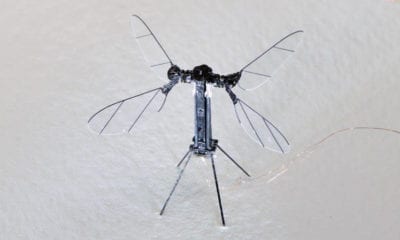
Amazing Recovery Capabilities – Integrated in an Aircraft for Wind Tunnel Testing
As the results show, there are excellent recovery capabilities of the spanwise morphing wing. This is why the author decided to make another leap forward and propose a novel bioinspired tail actuator for multifunctional pitch and yaw control using MCFs.
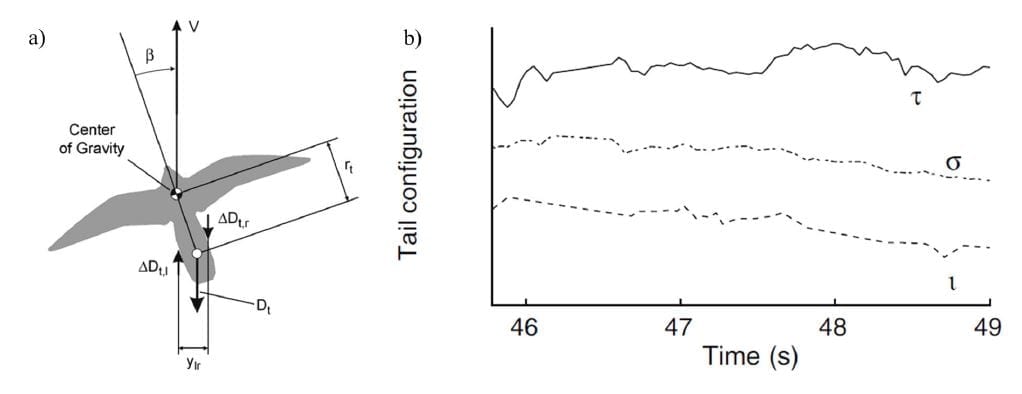
a) Depiction of tail effects on drag in sideslip from b) in flight measurements of tail pitch l, twist, and spread going into a banked turn from
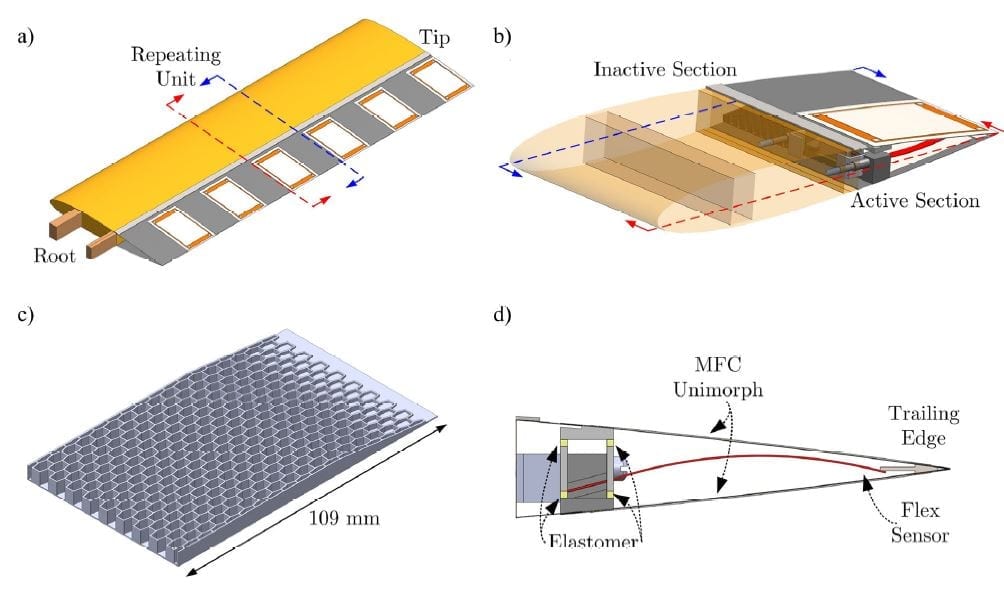
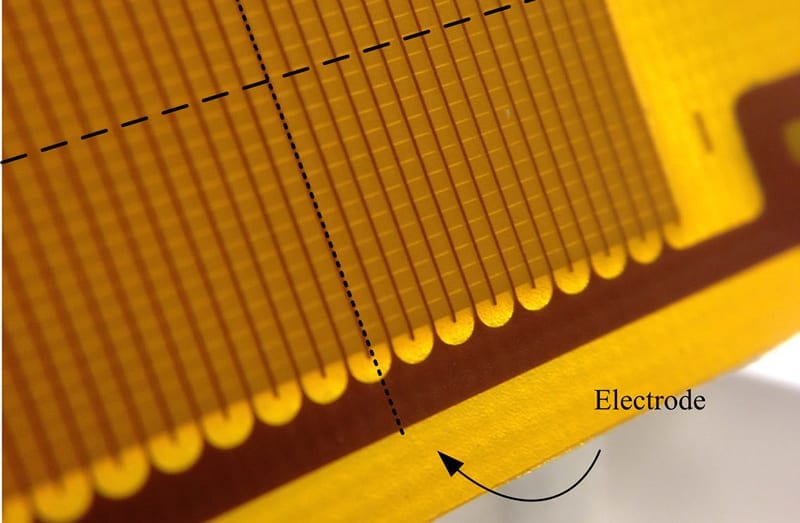
Diagram of a) SMTE full isometric view b) repeated section isometric view c) inactive
honeycomb d) cross-sectional view of the active trailing edge components
The optimized actuator comes with two Finite Element Method (FEM) models which are compared to determine both an appropriate method for modeling MFC actuators – integrated into a bioinspired aircraft for wind tunnel testing.
After analyzing every single characteristic of the aircraft such as its velocity, speed, performance etc. – the author of this paper comes with preliminary conclusions of the actuation mechanism which show great yaw control performance in tests of sideslip response.
“Due to the complex 3D curvature of the tailored MFC actuator, the mechanism was theorized to provide pitch control as well when the actuators were deployed in a symmetric configuration. Here, the effectiveness of the bioinspired actuator with respect to pitch angle was assessed experimentally and briefly validated through RANS simulations. Experiments were conducted with both symmetric and asymmetric actuation to investigate both the pitch and yaw controllability.”
General Conclusions and Future Recommendations
The general conclusion is that the development and analysis of a rudderless aircraft concept is definitely feasible – extending the existing morphing aircraft concepts to a wider range of operating conditions.
A key improvement for future models similar to this (and development works) would be the incorporation of internal sensors. According to the author, using them could potentially replace the internal variable resistors within the wings of the aircraft as well as extend to the tail actuator as well.
Citation: Bioinspired Control of Rudderless Morphing UAVs, Gamble, Lawren, http://hdl.handle.net/2027.42/145843