News
A Bio-Inspired Hummingbird Robot
Researchers have been taking inspiration from mobility patters and functioning of birds to be used for drone designs. Drones equipped with such features would be able to maneuver better as first responder assistants through collapsed buildings and other cluttered spaces to find trapped victims.
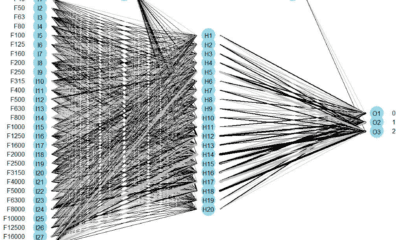
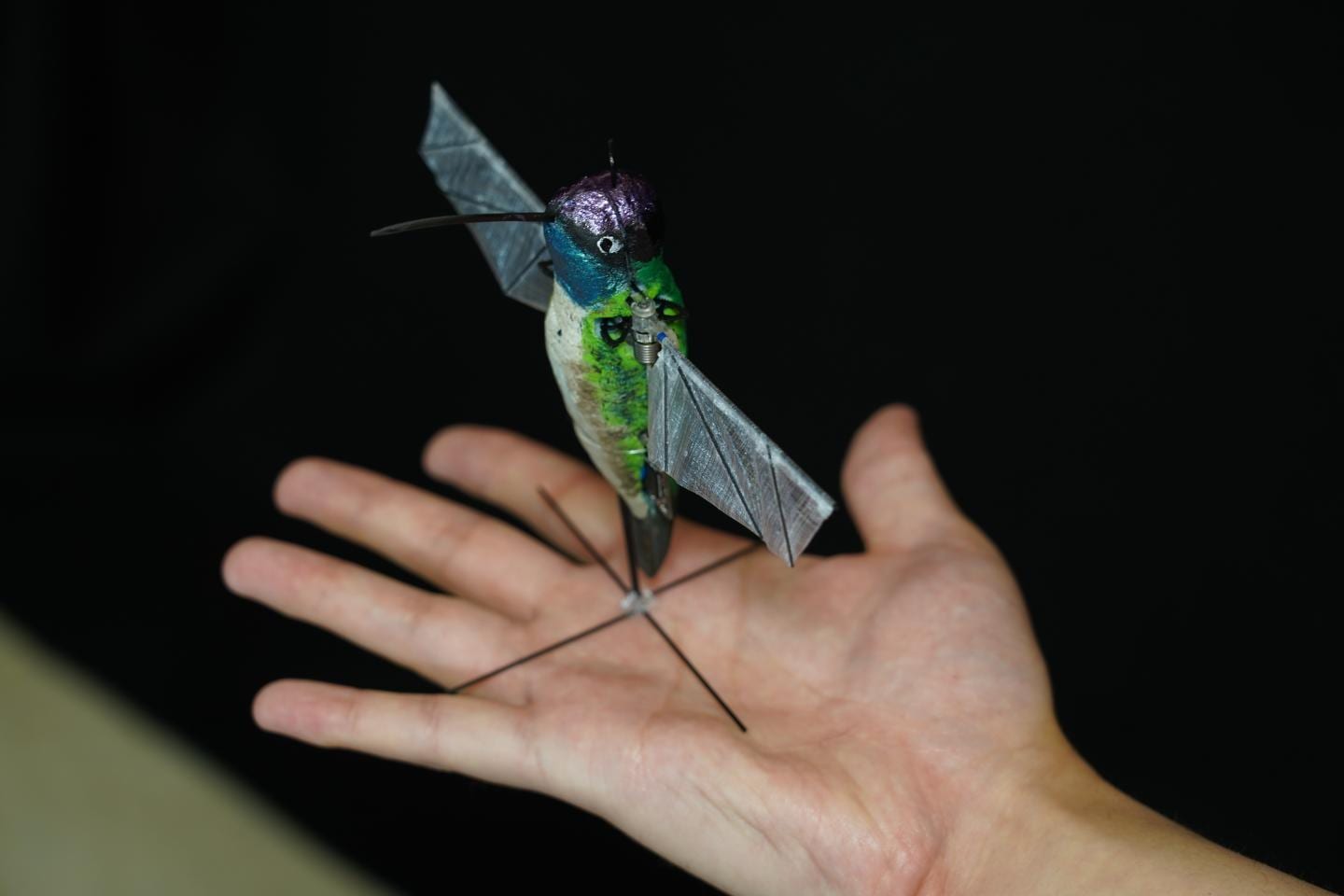
Purdue researchers have created a bio-inspired hummingbird robot: Trained by artificial intelligence, weighing only 12 grams, and utilizing unsteady aerodynamics to hover, just like the real hummingbird.
The Purdue Hummingbird, a flapping-wing robot with 17cm wingspan and 12 grams weight, with a pair of 30-40Hz flapping wings is driven by only two actuators. By interpreting the wing loading feedback and its variations, the vehicle can detect the presence of environmental changes such as grounds, walls, stairs, obstacles and wind gust. The effectiveness of the robotic hummingbird was experimentally demonstrated on several challenging flight tasks without vision: terrain following, wall following and going through a narrow corridor. To ensure flight stability, a robust controller was designed for handling unforeseen disturbances during the flight.
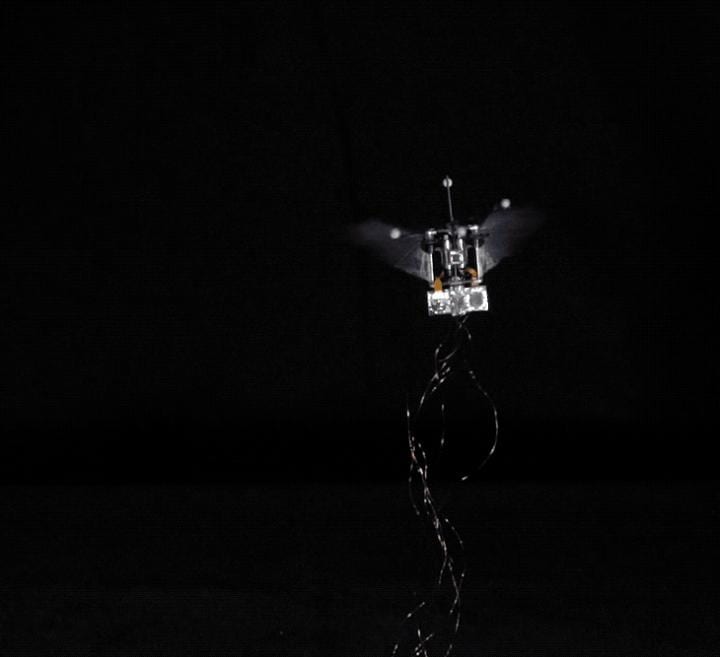
This robotic hummingbird flies on its own while tethered to an energy source, but will soon be powered on batteries. Credit. Purdue University video/Bio-Robotics Lab
Xinyan Deng, an associate professor of mechanical engineering at Purdue said, “The robot can essentially create a map without seeing its surroundings. This could be helpful in a situation when the robot might be searching for victims in a dark place – and it means one less sensor to add when we do give the robot the ability to see.”
Deng’s group and her collaborators analyzed hummingbirds for many summers in Montana. They documented key hummingbird manoeuvres like making a rapid 180-degree turn, and translated them to computer algorithms that the robot could learn from when hooked up to a simulation. The smaller the size, the greater the wing flapping frequency, and the more efficiently they fly, Deng says.
The robots have 3D-printed bodies, wings made of carbon fibre and laser-cut membranes. The hummingbird robot can lift more than its own weight, up to 27 grams. Designing their robots with higher lift gives the researchers more wiggle room to eventually add a battery and sensing technology, such as a camera or GPS. While the robot requires to be tethered to an energy source while it flies researchers say that won’t be for much longer.
The robots could fly silently just like real hummingbirds do, making them ideal for covert operations. Researchers demonstrated how steady the robotic hummingbirds stay through turbulence by testing the dynamically scaled wings in an oil tank. Robotic hummingbirds would also allow biologists to study hummingbirds in their natural environment through the senses of a realistic robot more reliably. Simulations of the technology are available open-source at https://github.com/purdue-biorobotics/flappy.
Early stages of the work, including the Montana hummingbird experiments in collaboration with Bret Tobalske’s group at the University of Montana, were financially supported by the National Science Foundation.
The researchers will present their work on May 20 at the 2019 IEEE International Conference on Robotics and Automation in Montreal.