News
Dynamic Speed Control of Drones for Data Collection Under IoT
One of the primary problems or challenges affecting drones (UAVs) is the battery and power management. Power limitations are also a limiting factor in data acquisition – the IoT based solution for large-scale and remote sensor devices. The access collisions in the MAC layer lead to high power consumption for both sensor devices and UAVs, and low efficiency for the data collection.
Dynamic Speed Control
A research paper by Chinese researchers, Qi Pan, Xiangming Wen, Zhaoming Lu, Linpei Li and Wenpeng Jing – titled “Dynamic Speed Control of Unmanned Aerial Vehicles for Data Collection under Internet of Things,” analyzes this problem and proposes an innovative solution towards its resolution. In this paper, a dynamic speed control algorithm for UAVs (DSC-UAV) is proposed to maximize the data collection efficiency, while alleviating the access congestion for the UAV-based base stations.
Working of Dynamic Speed Control for UAVs
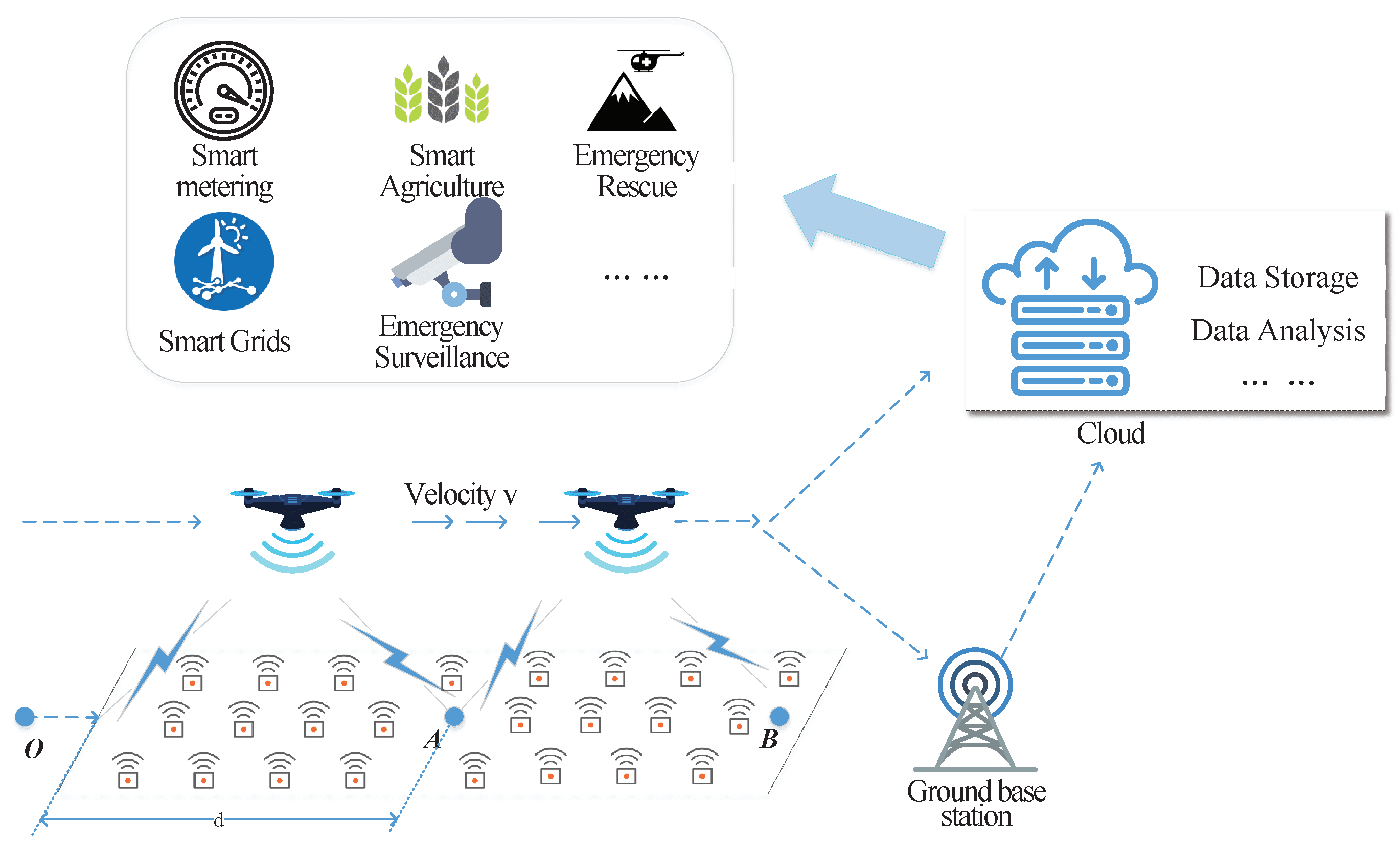
Taking the congestion state of a MAC layer into consideration, the researchers dynamically adjust UAVs’ speed adaptively for reliable and efficient data collection. When a ground sensor device enters the communication coverage of drones, it is activated by UAVs and wakes up to establish the network connection via Random Access Procedure, conveniently known as RAP.
Under the proposed scheme, UAVs dynamically adjust the flight velocity adaptively according to the amount of devices under current communication coverage areas. With congestion status considered, the time for collecting data from sensor devices is significantly decreased, simultaneously reducing the energy consumption of both sensor devices and UAVs. More sensor devices can finish their data transmission within a limited flight duration.
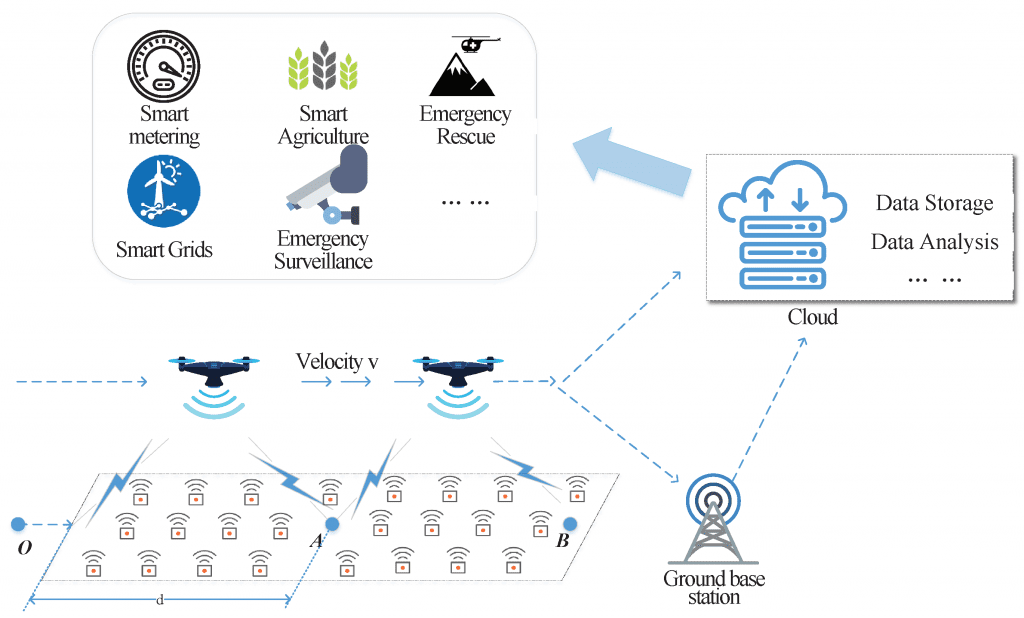
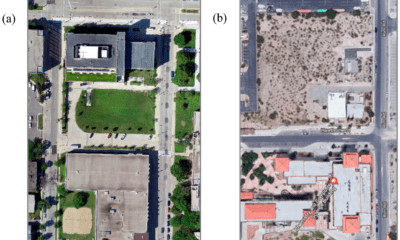
Data collections via UAVs.
Data Collection Efficiency
The researchers defined data collection efficiency themselves such as to reflect the capability of UAVs to handle data collection from massive sensor devices.
They define Data collection efficiency simply as the number of devices whose data acquisition has successfully completed per RASs of flight duration for the UAVs.
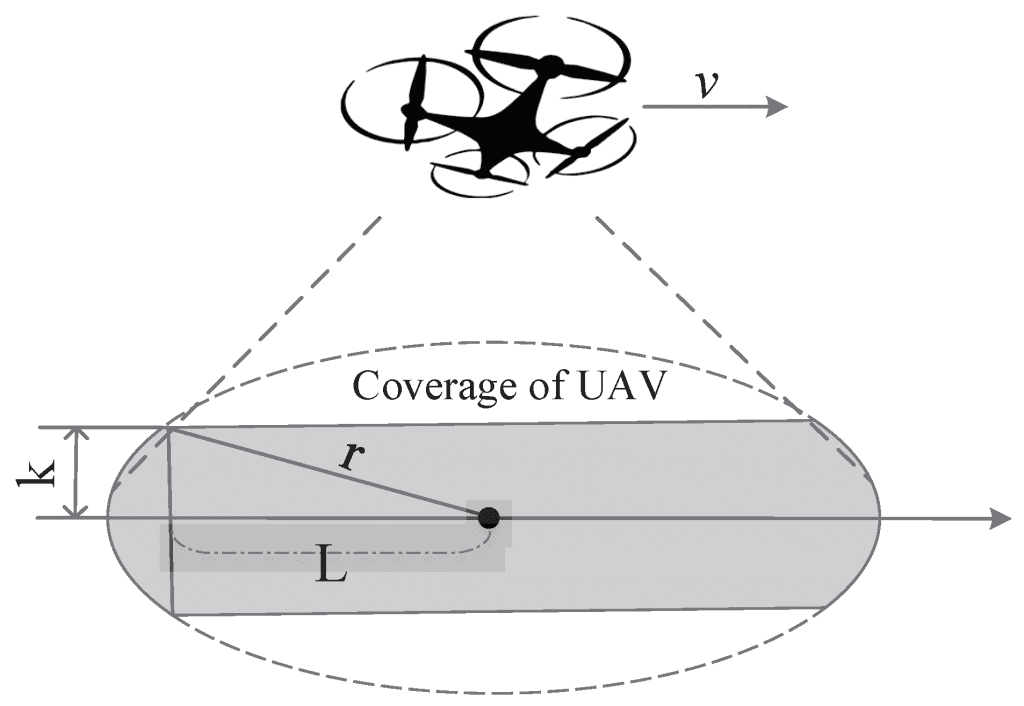
Coverage analysis of UAV-based aerial base stations.
RAP Under a Cellular Network
- When a sensor device is at its first initial access, not synchronized, close to handover or after a radio link failure, a separate physical random access channel (PRACH) is provided for connection establishment.
- For energy-saving in WSNs, the sensor devices always stay in sleep mode unless activated by UAVs. For simplicity, the RAP represents the contention-based RAP for the rest of this paper.
- Via broadcast System Information Block 2, messages from the flying Evolved Node B, devices learn about the details of access channels, including the PRACH configuration index, the PRACH frequency offset, and the available number of preamble sequences.
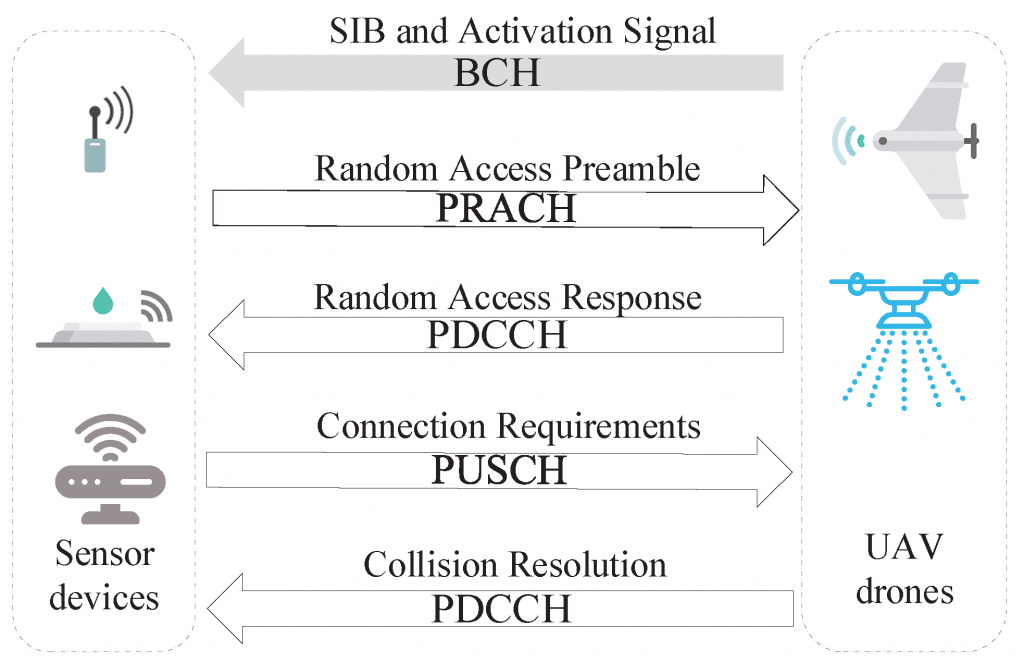
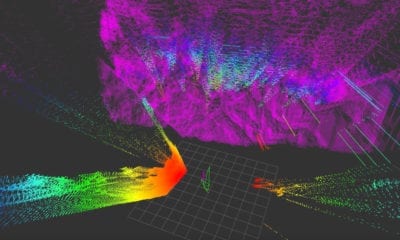
Random access procedure under a cellular network.
Implementation of Dynamic Speed Control for UAVs
UAV processing can be choked or overloaded with data particularly in the case of a high density of sensor devices in any given area or if the UAV flies at high speeds. The number of newly arrived access attempts per RAS, DM in such cases is so large that the flying radio access network ultimately suffers heavy congestion and overload. Plenty of devices come across collisions and keep retransmitting their access requests. As a result, most devices cannot send data to UAVs, leading to high energy consumption and low data collection efficiency.
When UAVs fly with a low speed, the arrival rate is low and there are no collisions during the connection establishment process. UAVs can only collect data from a small number of sensor devices owing to the low arrival rate. The whole number of successful sensor devices within the flight duration of UAVs is too small, leading to low access resource utilization and a low data collection efficiency.
Thus, an optimal speed of UAVs under different sensor device densities is needed to maintain an optimal arrival rate, maximizing data acquisition by any UAV system while improving power management of each individual UAV simultaneously.
Citation: Dynamic Speed Control of Unmanned Aerial Vehicles for Data Collection under Internet of Things, Qi Pan, Xiangming Wen, Zhaoming Lu, Linpei Li and Wenpeng Jing – Sensors 2018, 18(11), 3951; https://doi.org/10.3390/s18113951