Autonomous
Artificial Landmarks for Autonomous Drones Based on Magnetic Sensors
The localization of autonomous vehicles and drones in particular is a complex topic nowadays. Moreover, it is a topic that strongly depends on the current environment. The common radio frequency (RF) approaches that use frequencies in the gigahertz range are shown to work best in open spaces, but show significant deficiencies in buildings and environments where radio waves suffer from reflections due to the environment.
New Paper Focuses on the Use of Near Field Magnetic Sensors in Low Frequency Domains
In fact, this is the subject of a new paper which focuses on the use of near field magnetic sensors working in the low radio frequency domain in order to determine three Degrees Of Freedom (3DOF) for localization.
As the authors note in the introduction of the paper, a system like this “provides advantages since it is robust against reflection of waves, and the localization can be facilitated without the necessity of vision based on cameras or other optical sensors.”
These landmarks are automatically detected and integrated into the Robot Operating System (ROS) which can be employed on a drone which comes into the vicinity of such a landmark but also on any other vehicle equipped with the necessary hardware.
The authors also examine a software architecture and a hardware architecture of the project. As they state in the software part:
“The software architecture consists of two components as can be seen in Figure 1: first the artificial landmark and second the mobile robot platform. The artificial landmark prototype consists of a coil setup made out of three coils, which is connected to the read-out hardware, i.e., the SDR platform, via coaxial cables using SMB plugs. The SDR is connected to a Laptop via a 1 GBit/s Ethernet, this in turn runs software that does the post-processing of the incoming sensor data of the coils. It calculates the position information relative to the artificial landmark.”
Moreover, the software architecture proposes an artificial landmark which is in range of the NCAP and WNP which runs on the mobile robot platform that connects to the NCAP. After this step, the NCAP converts the raw data stream coming from the artificial landmark into position information which creates a ROS node for the sensor and sends the data into the ROS system accordingly.
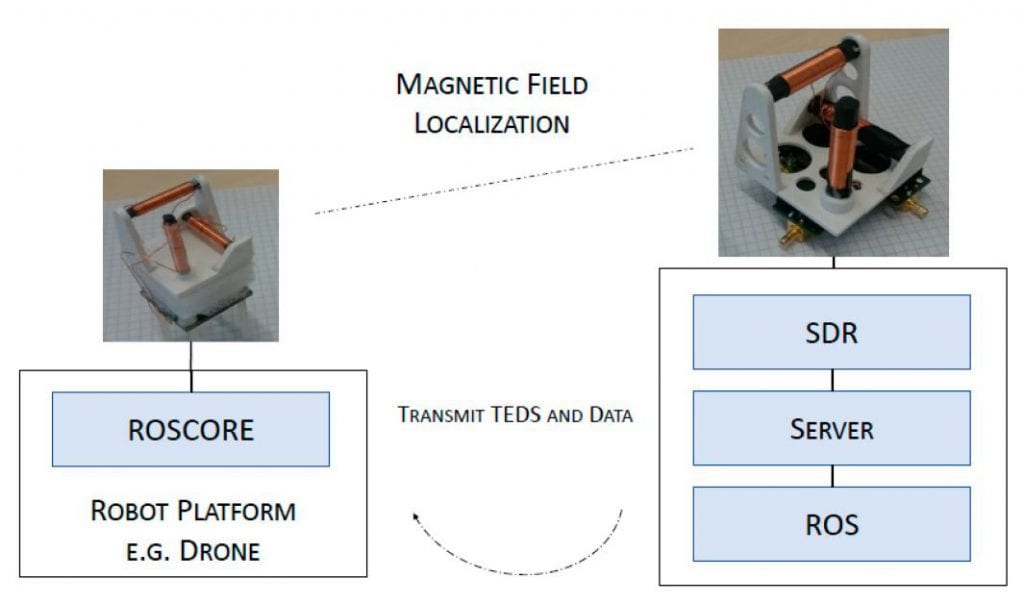
Left is the schematic of the mobile system equipped with a smaller coil setup. Right is the artificial landmark station with a static pose and holds a larger coil system. On the side of the landmark, the coil system is connected to an SDR platform for further signal processing.
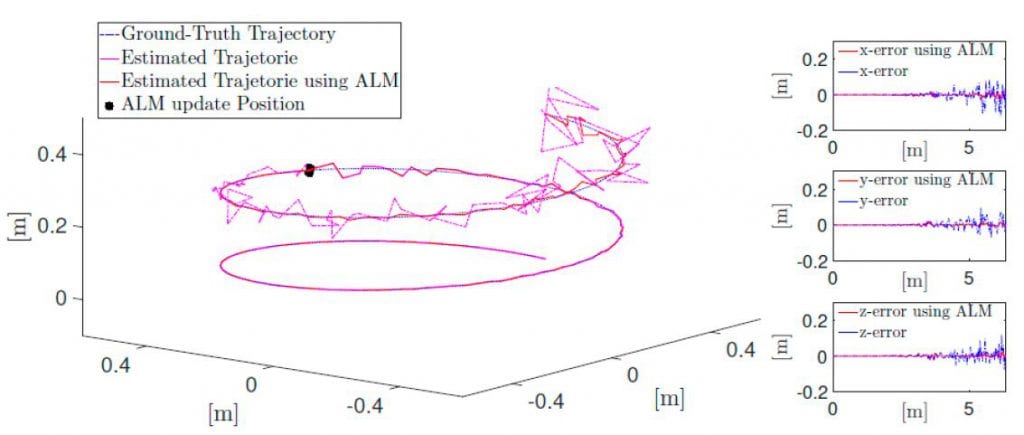
Simulation of drone flight with drift and drift correction through artificial landmark
Hardware that Employs Magnetic Sensors Drifting in GPS Denied Environments
The hardware part, on the other hand, employs magnetic sensors and a drone which drifts over time in Global Positioning System (GPS) denied environments. As the group states in the paper:
“One motivation for these artificial landmarks employing magnetic sensors is, that localization of a drone drifts over time in Global Positioning System (GPS) denied environments. This results in the drone missing its goal, if set to fly to a position starting at the last well-defined position. Therefore these artificial landmarks are used to counteract the drift of the drones’ localization.”
The used magnetic sensor for the artificial landmark is a 3D-printed prototype that consists of three orthogonally placed magnetic coils where the relative position of each coil is known.. The relative position of the drone, according to the group, is with respect to the artificial landmark and is estimated by using the received signal strengths.
On top of this, a possible position drift can also stem from a scale error of a visual Simultaneous Localization and Mapping (SLAM) system – if it is equipped with a camera. The flight plan in this scenario will be defined by the white noise behavior of the accelerometer which leads to a second order random walk behavior in the position information.
Final Words
After presenting the figures of the hardware and software models as well as the overall approach, he authors formalize the approach to automatically connect the artificial landmarks which will consist of magnetic sensors to propose a mobile robot platforms framework.
Citation: Artificial Landmarks for Autonomous Vehicles Based on Magnetic Sensors, Tobias Mitterer, Harald Gietler, Lisa-Marie Faller and Hubert Zangl, Proceedings 2018, 2(13), 856; https://doi.org/10.3390/proceedings2130856