News
Simulation Framework for Tethered Underwater Drones and ROVs
Nowadays, underwater Remotely Operated Vehicles (ROVs) or underwater drones and operate in underwater scenarios and highly complex of aquatic environments. The models here include a wide range of objects that are monitored – including rocks, fish as well as marine plankton in addition to a ROV tether.
Modified Cable Simulation in Underwater Scenarios Through the Use of ROVs
A new scientific paper by researchers Ori Ganoni, Ramakrishnan Mukundan and Richard of the University of Canterbury, New Zealand, focuses on a modified cable simulation for the underwater physical conditions – developed specifically for tethered ROVs and involving models for low visibility conditions and intrinsic camera effects that are unique to the underwater environment. The paper is titled, ‘A Generalized Simulation Framework for Tethered Remotely Operated Vehicles in Realistic Underwater Environments’.
The authors describe ROVs in the first lines of their introduction:
“Remotely Operated Vehicles (ROVs) are being increasingly used in aerial, land and underwater applications such as inspection, photography, surveillance and recovery. In most cases, such as drones and land vehicles, cameras and other vision sensors, such as depth sensors, are attached to the body to provide real time information, either to a remote operator or to an autonomous system. The need for visually realistic simulation becomes clear under those circumstances to provide footage as close as possible to a real environment.”
Implemented using the Unreal Engine 4 realistic game engine to be part of the framework, the authors developed a generalized method for implementing an ROV dynamics model which can serve as a configurable component inside the framework.
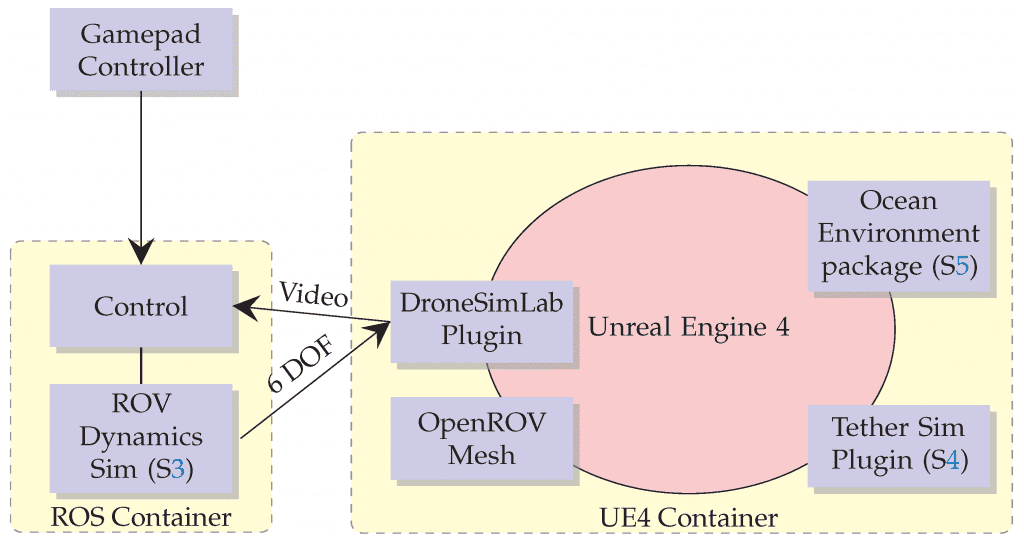
Simulation Diagram. This diagrams shows the components of the simulation and the main communication channels. S4, S5 and S3 refers to the relevant sections in this paper.
Exploring the Unique Characteristics of Underwater Simulation and Models Involved
More importantly, the paper focuses on exploring the unique characteristics of underwater simulation and the specialized models that are developed for that environment. They also use computer vision algorithms for feature extraction and featuring tracking as a probe for comparing experiments that are done in the simulated environment against real underwater experiments.
The framework bases on a gamepad controller which controls the ROV dynamics sim and through video relates to the Drone SimLab Plugin, the OpenROV Mesh, the Tether Sim Plugin and the Ocean Environment package.
To simulate the ROV dynamics, they use two approaches. The first is using the internal game engine physics engine and the second is the use of external engine independent of the game engine environment. In order to simplify the work, they have made an assumption which will affect the ROV behavior and is covered in the following sections of the paper.
From kinematics to inertia, dynamics and simulation, they focus on physics to simulate the results in a demo scenario. The general findings come in a form of a step-by-step procedure for creating a dynamic rigid body underwater ROV simulation, integrating it into any simulation framework independent of programming language or operating systems.
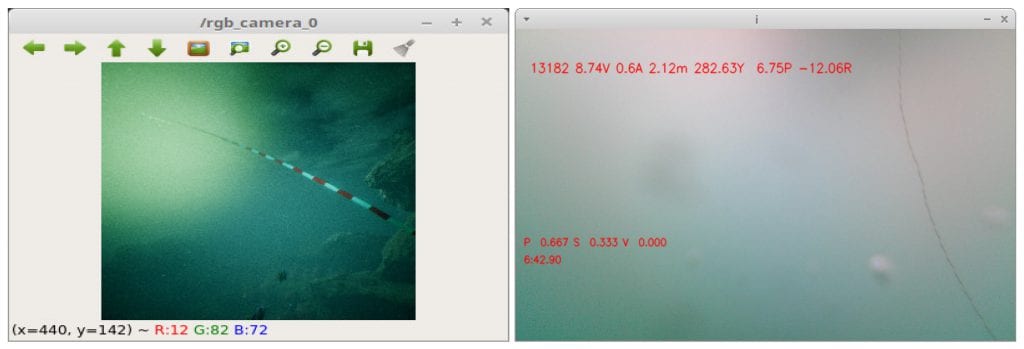
The underwater ROV sees its own tether in the camera view. On the left is an image taken from our simulation and on the right an image taken from one of our dives with the OpenROV in Port Levy, New Zealand.
“The main aim of this work has been to generate a convincing and realistic behaviour of an underwater tethered robot using the simulation framework provided by the Unreal Engine 4. The experiments were done in the editor environment (not as a packed game),” the authors said after presenting their unique algorithm.
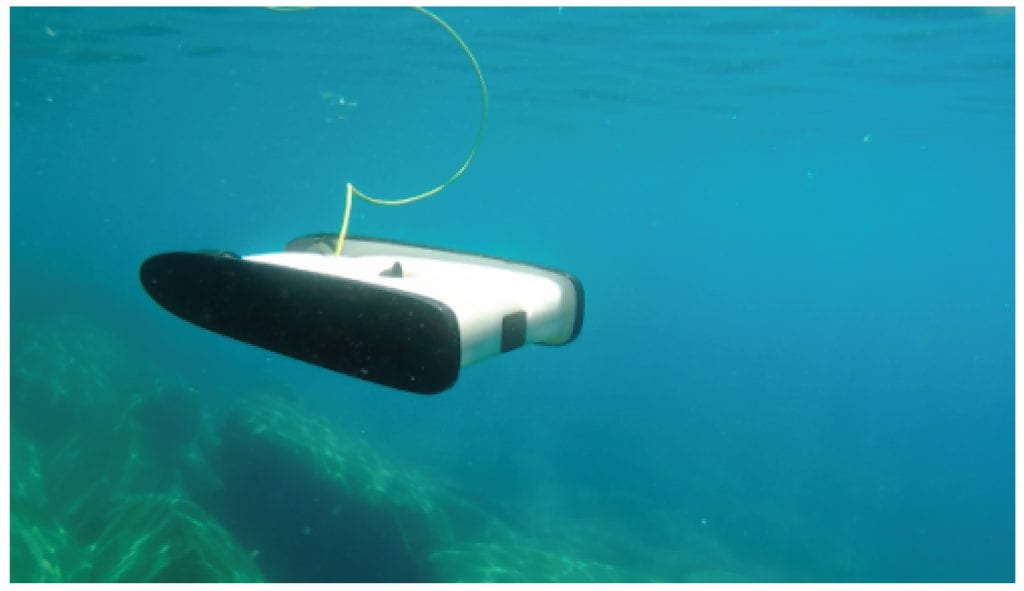
A small underwater OpenROV robot connected through a thin cable for video and control transmissions
Unreal Engine 4 editor environment.
Experimental verification of motion of an extensible cable. We colored the cable in a checkers like pattern to enable the extension of the cable to be observable.


Test Case Results and Conclusion
From all the work, we can conclude that there are just too many factors which affect these types of studies. The light in the ocean, planktons and entire environment is changing as we speak which is why the development of ROV systems should be continuous.
“Developing an underwater simulation is a multidisciplinary task involving different expertise from the different domains. The existing tools today from the different domains can provide the necessary components. In this paper we covered all the parts which comprise a full-scale simulation. Each part was accompanied by a relevant sub simulation for additional per case tuning,” the authors concluded.
As they also noted, their future research will focus on building and comparing more complex ROV models with multiple cameras as well as ones with better maneuverability compared to the OpenROV – as well as different algorithms in both simulated and real environments.
Citation: A Generalized Simulation Framework for Tethered Remotely Operated Vehicles in Realistic Underwater Environments, Ori Ganoni, Ramakrishnan Mukundan and Richard, Drones 2019, 3(1), 1; https://doi.org/10.3390/drones3010001Green – https://www.mdpi.com/2504-446X/3/1/1