An Advanced First Aid System Based on Drones and Wireless Body Area Sensors
New research is working on a practical solution for scenarios of serious injuries such as a hip fracture or head injury to elderly persons as a result of a fall.
The proposed advanced first aid system (AFAS) for the elderly in outdoor settings is based on a wireless body-area sensor network (WBSN). A hybridized algorithm that combines HR measurement and acceleration to detect falls, named “fall detection based on heart rate threshold” (FDB-HRT), was proposed.
The AFAS consists of two main parts. The first part, the prototype fall detection device (FDD), is designed for monitoring HR and detecting falls. It consists of a microcontroller; two bio-sensors (HB and ACC) for HR and acceleration; a GPS module to track location, and a GSM module to send a notification message to the Smartphone of caregivers at a call emergency center (CEC).
The second part is the CEC’s provision of first aid to the patient which includes a first aid package, a smartphone, and a UAV to deliver the first aid package. The smartphone at the CEC is used for two purposes: to receive messages from the FDD and to plan the path for the UAV.
The main principle of the proposed AFAS is the FDD, which is attached to the patient’s upper arm and performs monitoring and decision-making activities according to the FDB-HRT algorithm. Once the proposed FDD detects a body fall and the HR measured is abnormal, the FDD sends messages to the CEC that include the patient’s information (ID, health status, and location).
The caregivers in the CEC receive messages to display on the LCD of the Smartphone. Accordingly, the first aid package will be prepared according to the patient status and sent via the UAV to the patient on the basis of the coordinates received in the message.
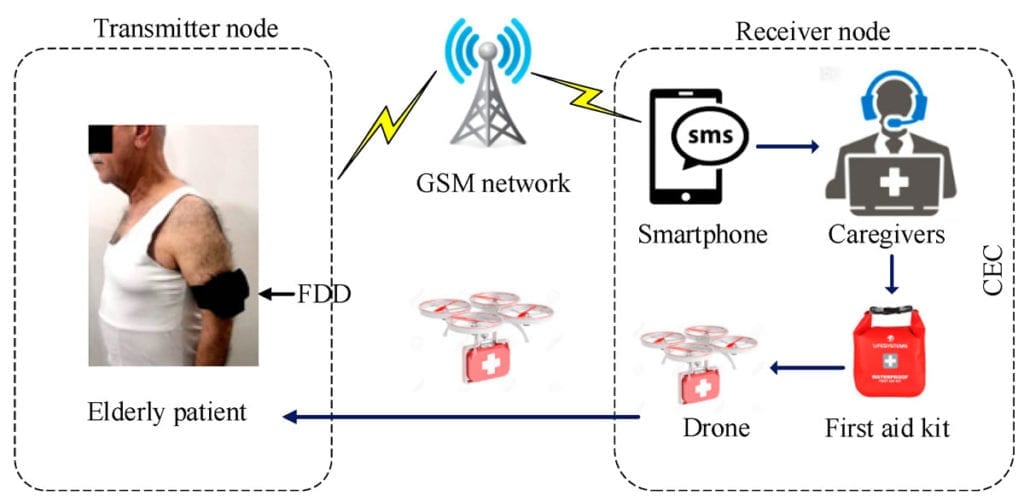
Block diagram of the overall AFAS.
The experiment consisted of five steps:
- First, the caregivers received a message from the FDD on their Smartphone.
- Second, caregivers planned the flight path using the waypoint mode of the Autopilot program.
- Third, the UAV flies autonomously from the CEC to the patient according to the selected flight path. The time that elapsed to deliver the first aid package by Unmanned Aerial Vehicle (UAV) to the patient’s location was calculated based on the GPS timer.
- Fourth, the caregivers sent an ambulance to the patient location and calculated the time required for the ambulance to reach the location using the Smartphone timer.
- Finally, the average time savings for the four adopted locations was calculated.
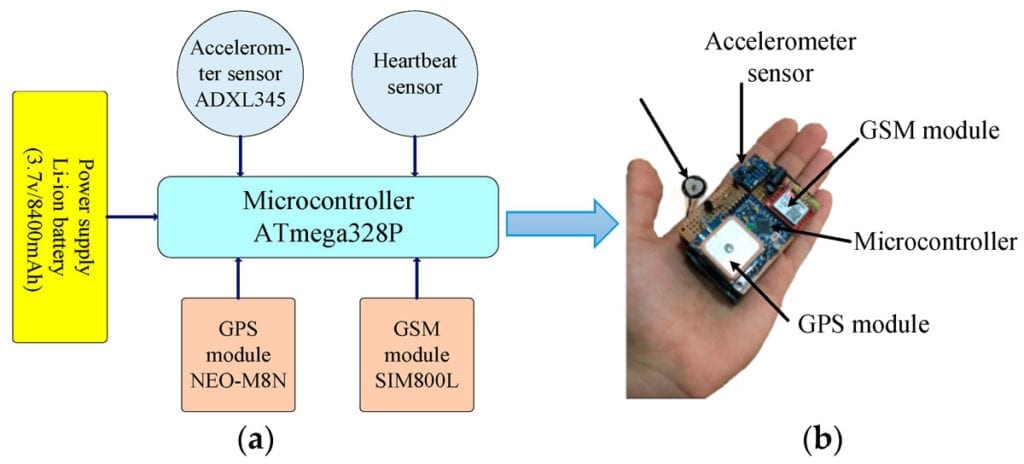
Proposed FDD (a) Block diagram, and (b) Hardware.
In this work, PAR hospital in Erbil, Iraq was adopted as the CEC from which to send the UAV and ambulance. Patient locations were specifically selected for being crowded and difficult to access. Two locations were in a crowded residential neighbourhood with narrow streets and about 50 m from a school and two others were in a city centre, near a popular market.
For the study, an advanced proportional–integral–derivative (PID) algorithm was installed in the Autopilot program, version 4.7, and based on waypoint mode, used to draw the flight path of the UAV. The direction and duration of movement along the flight path is determined by the mission type, and some mission types offer mission completion actions. While autopilot is engaged, the UAV’s mission type can still be changed and more than one mission can be executed during a single engagement.
The research team worked with five volunteers who were invited to evaluate the performance of the heartbeat sensor relative to a benchmark device, and the extracted data was validated using statistical analysis. In addition, the accuracy of fall detections and the recorded locations of fall incidents were validated.
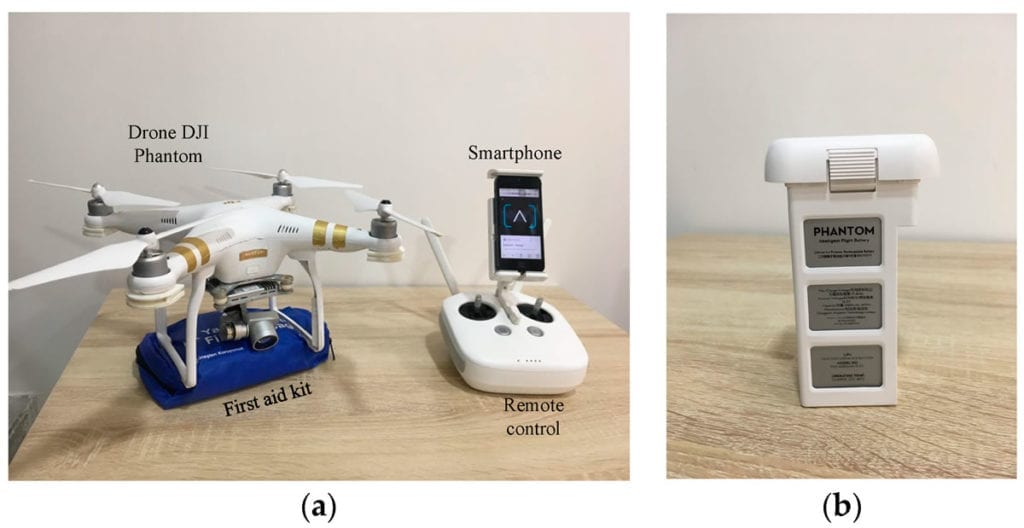
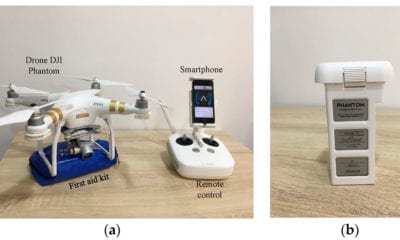
UAV adopted to deliver first aid; (a) All components of the DJI Phantom 3, (b) Battery pack.
Conclusions
The proposed FDB-HRT algorithm was 99.16% and 99.2% accurate with regard to heart rate measurement and fall detection, respectively. In addition, the geolocation error of patient fall incidents based on a GPS module was evaluated by mean absolute error analysis for 17 different locations in three cities in Iraq. In addition, the results revealed that in urban areas, the UAV succeeded in all missions and arrived at the patient’s locations before the ambulance, with an average time savings of 105 s. Moreover, a time saving of 31.81% was achieved when using the UAV to transport a first aid kit to the patient compared to an ambulance.
Thus it was concluded that compared to delivering first aid via ambulance, the proposed design greatly reduces delivery time. The proposed advanced first aid system outperformed previous systems in terms of accuracy of heart rate measurement, fall detection, and information messages and UAV arrival time.
The research team comprised Saif Saad Fakhrulddin, Sadik Kamel Gharghan, Ali Al-Naji and Javaan Chahl with support from Middle Technical University, Baghdad; College of Dentistry, University of Mosul, in Iraq and the School of Engineering, University of South Australia and Joint and Operations Analysis Division, Defence Science and Technology Group, Melbourne, Australia.
Citation: An Advanced First Aid System Based on an Unmanned Aerial Vehicles and a Wireless Body Area Sensor Network for Elderly Persons in Outdoor Environments, Saif Saad Fakhrulddin, Sadik Kamel Gharghan, Ali Al-Naji and Javaan Chahl, Sensors 2019, 19(13), 2955; https://doi.org/10.3390/s19132955 – https://www.mdpi.com/1424-8220/19/13/2955/htm