News
Countering Illegal Drone Flights with Passive DVB Radar
There is an ongoing struggle against illegal flights in the field of unmanned aerial vehicles (UAVs) nowadays. From detection to identification, extraction as well as location, many authorities lack a system that would identify and see UAV flights in a clear and transparent way.
However, an article submitted by Poullin Dominique from Onera, France, aims to observe UAV flights in different countries and under various environments. With this, the author attempts to counter illegal activities in many countries – all through a unique and vital component that will illustrate clear and transparent data for both the detection, identification, location and alert functions.
A Passive DVB-T (Digital Video Broadcasting-Terrestrial) System
In the article, the author proposes the development and use of a passive DVB-T component that will offer very attractive capabilities for struggling against UAVs at ranges up to 3 kilometers and even more in terms of detection, identification, location and alert.
In other words, this system would be able to counter illegal UAV flights – but also show each UAV in an interactive way and outline information about every detail regarding the flight. The author particularly addresses the struggle against illegal UAV flights – and her solution to ‘the warning times’ as the most important aspect.
Aside from actually monitoring and identifying each UAV flight in the sky, the DVB-T (Digital Video Broadcasting-Terrestrial) system will also prevent threats and handle certain scenarios simultaneously – with a short warning time and without any requirement to another sensor.
The Main UAV Struggle Requirements
According to the author, the main struggle requirements for UAVs require the following functions (as published in the paper):
- Detection : the UAV has to belong to the mobile objects detected and the surveillance has to be achieved in a wide sector. Ideally the observed sector has to be omnidirectional
- Identification : in this paper identification refers only to a plot attribute/flag : ‘UAV’ or ‘no interest’. The identification of the UAV class (quadcopter, hexacopter, … fixed-wing) may help for establishing a level of threat but is not compulsory for a first alert level.
- Extraction: the UAV plots (and attributes) have to be separated from the others and kept.
- Location : all the plots of interest (and especially the UAV) have to be located in cartesian coordinates according to the receiver site. A tracking will also help for predicting the UAV behaviour, but is not necessary for a first alert level.
- Alert : if a plot is identified as a UAV one and if its location is inside the forbidden perimeter: the alert has to be effective.”
The author also proposes the use of two mechanisms in the identification process – the UAV plot which would flag UAVs as ‘suspicious’ ones and a signature that would be present on any UAV. The first alert level could be simply achieved by the combined direct identification of the UAV and its location inside a specific (or forbidden) perimeter.
The First Level of Alert as the Main Difficulty in the UAV Struggle
The main constraint here is related to the short warning times. As the author noted, the UAV is a small object which is less visible and the maximum detection range is generally quite small (a few kilometers). As such, the range requirement could be very small (a few hundred meters up to a few kilometers) and a speed close to 20 meters per second can additionally delay the warning time.
According to the author:
“The real difficulty in the UAV struggle is not the detection but the first level of alert if your surveillance component has no identification capabilities and requires a systematic identification by another dedicated sensor.”
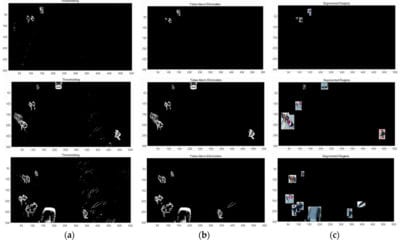
However, there have been several experimental results that were presented in this article – all in order to illustrate the good performances of a solution like this. More importantly, the analysis went through all the different scenarios and situations – showing that the use of a passive DVB radar can potentially stop illegal drone flights and bring certain control in the increasingly saturated presence of UAVs nowadays.
Citation: “Countering illegal UAV flights : passive DVB radar potentiality,” by D. Poullin, 2018 19th International Radar Symposium (IRS), Bonn, Germany, 2018, pp. 1-10.
doi: 10.23919/IRS.2018.8447902 | URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8447902&isnumber=8447894