News
Magnetic Surveying with an Unmanned Ground Vehicle
With the recent proliferation of unmanned aerial vehicles (UAVs) for geophysical surveying, a novel opportunity exists to develop unmanned ground vehicles (UGV) in parallel. Combined with a new generation of lightweight magnetometers that have been designed to meet the needs of the emerging UAV market a novel opportunity exists for the instrumentation of UGVs with UAV magnetometers for robotic surveying. A Canadian research team tackles the opportunity in a research paper titled, ‘Magnetic surveying with an unmanned ground vehicle‘, that’s published in the Journal of Unmanned Vehicle Systems.
Examining Magnetic Surveying in Detail and its Impact on Sensor Data Quality
The study looks at methods to identify and reduce the impact of magnetically noisy components of the unmanned ground vehicle platforms. The team of A. Hay, C. Samson, L. Tuck, and A. Ellery address all of the challenges in this new study which aims to show the integrated unmanned ground vehicle as a body that was instrumented in order to determine the impact of the magnetic UGV components on sensor data quality.
“A key issue was the interference caused by the UGV platform itself on the magnetic data. To minimize interference, a mounted tower design was implemented to increase the distance between the magnetometer and the magnetically susceptible components of the UGV. The integrated UGV was used to perform two comparative robotic magnetic surveys while mapping cultural targets and regional variations of the magnetic field.”
An Integration Exercise Where the UGV and Magnetometer are Used Together
As the researchers explain in the paper, the project is essentially an integration exercise where the UGV and the magnetometer are used together without changing their intrinsic design, with a main goal of identifying and assessing the severity of problems that would need to be addressed in the future development of this system or related ones.
The instrumentation that they used includes magnetometers, the Husky unmanned ground vehicle, an operations module and a sensor tower. The chassis, mounting rails, bumpers and plating of the UGV are composed of lightweight aluminum which has a low magnetic susceptibility.
After undertaking magnetic mapping of the unmanned ground vehicle, magnetometer-vehicle separation tests, fourth difference analysis and spectral analysis, the authors move on to data collection and processing, after which they interpret the data and discuss the benefits.
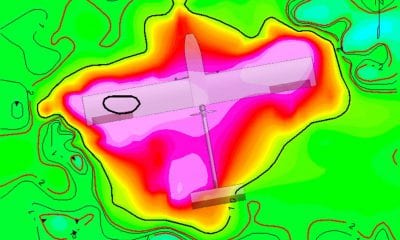
“The Husky UGV was designed for rapid scientific prototyping applications. When applied to magnetic surveying, it was found to have a large magnetic signature associated with ferromagnetic components in the electric motors and drive train.”

Photograph of the Husky A200 UGV in survey configuration. A field laptop was employed for troubleshooting and monitoring but was not integral to the operation of the system.
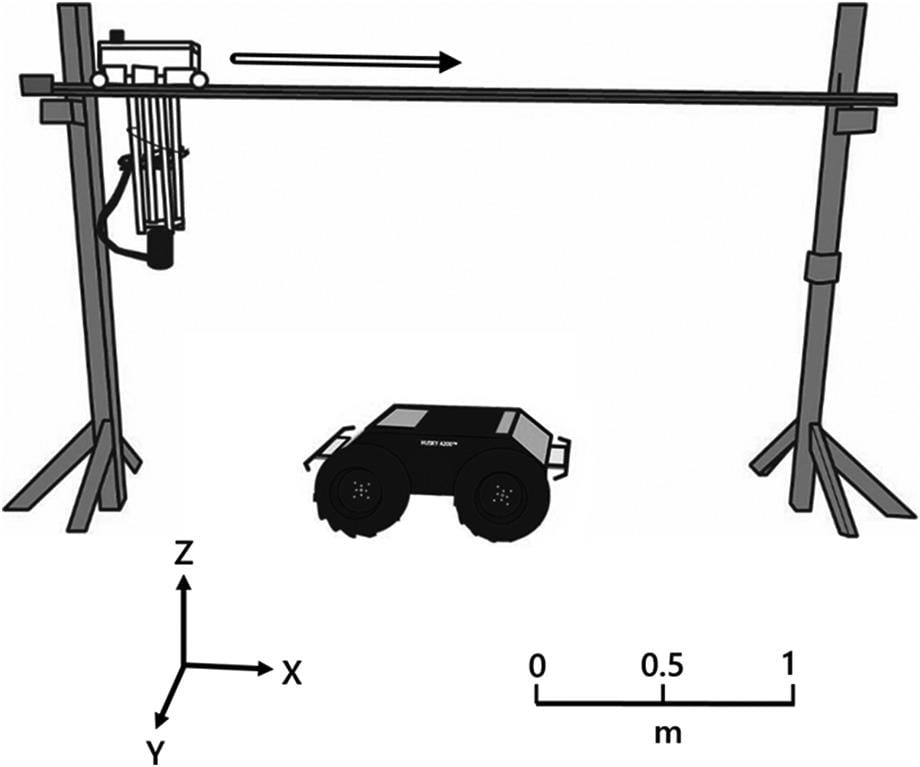
Magnetic scanning equipment setup. Traverses by the scanning cart along the rail (hollow arrow) were reversed for each subsequent scan. The x-axis is parallel to the rail, the y-axis is oriented out of the page, and the z-axis is oriented vertically.
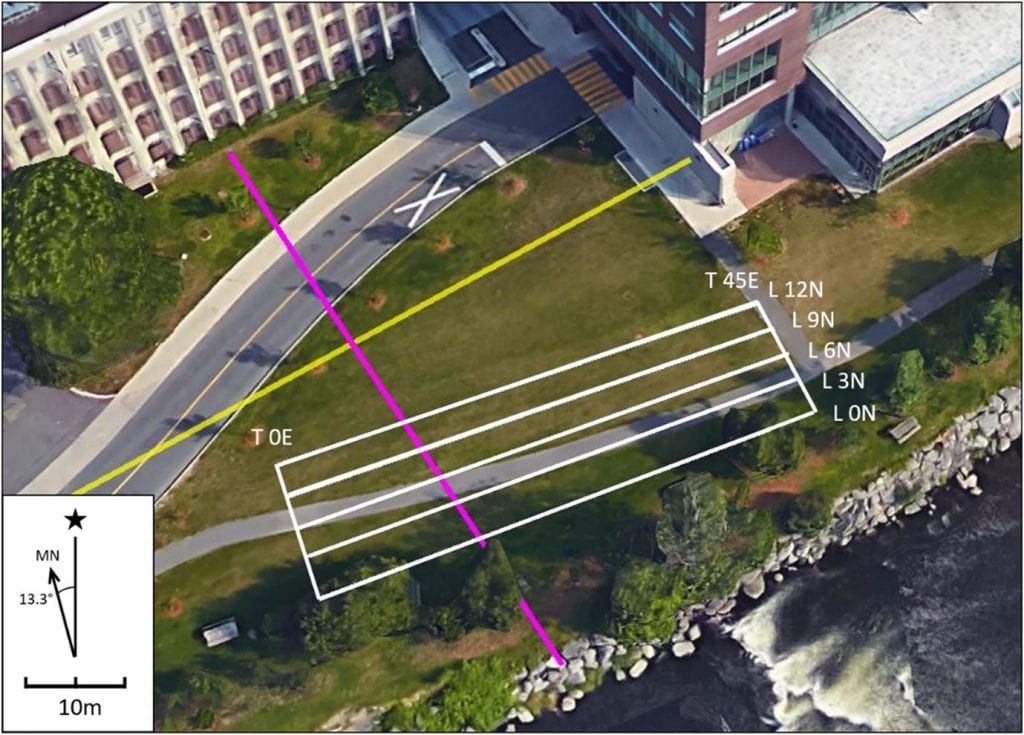
Carleton campus survey grid. The positions of the profile (L 0N, L 3N, L 6N, and L 12N) and tie (T 0E and T 45E) lines (white), a subsurface storm sewer (purple), and a gas pipeline (yellow) are marked. Gridlines were oriented with respect to magnetic north (MN) at 13.3° W declination from the orientation of geographical north (star). Background image source: Google Earth.
Reducing Impact of Ferromagnetic UGV Components
Because of this, they have found two hardware improvements that can be made to reduce the impact of ferromagnetic UGV components on the magnetic signal. The first one should be a replacement of the ferromagnetic steel wheel rims with non-magnetic alternatives, which would reduce the amplitude of magnetic oscillations.
The second recommended improvement, on the other hand, would be a redesign of the sensor tower using a rigid composite. Here, a rigid tower would be capable of supporting an increased sensor separation distance while a customized composite could mitigate the mechanical vibrations transmitted to the sensor.
Final Words
The positive baseline results from the tests clearly show that there are many opportunities for expansion of the system in the near future. One of the factors that limits current operations is the lack of remote operation capabilities – but can be easily changed by integrating navigational sensors such as panoramic video camera and a radio communications relay in the future – especially when piloted by a human tele-operator from a distant base station.
“This would enable analogue missions in hazardous environments, such as mine tailings dams, un-exploded ordnance contaminated terrain, and regions of active volcanism,” the authors concluded.
Citation: Magnetic surveying with an unmanned ground vehicle, A. Hay, C. Samson, L. Tuck, A. Ellery, Journal of Unmanned Vehicle Systems, 2018, 6:249-266, https://doi.org/10.1139/juvs-2018-0013