MIT Develops Fish-Shaped Drone to Explore Coral, Controlled by a Nintendo
For those of us who remember sitting in the bathtub as a small child, winding up a plastic fish who would then wiggle it’s way around soapy wet siblings, you are bound to love this new underwater drone from MIT.
With a soft body made out of silicone rubber and flexible plastic, and a 3D-printed head to contain the computer and electronics, scientists from MIT’s Computer Science & Artificial Intelligence Lab (CSAIL) hope ‘SoFi’ will enable them to swim closer to real fish than the usual pod-like underwater drones currently on the market.
If SoFI can do this, the researchers hope that they will be able to better study interactions of aquatic life and the dynamics of the ocean, they explained in a new journal article published this week in Science Robotics.
“To our knowledge, this is the first robotic fish that can swim untethered in three dimensions for extended periods of time,” says CSAIL PhD candidate Robert Katzschmann, who lead the authoring of the article. “We are excited about the possibility of being able to use a system like this to get closer to marine life than humans can get on their own.”
-

- Source: MIT CSAIL

-
- Source: MIT CSAIL

SoFi is nautical miles ahead of our tiny wind-up friend, with much more than it’s physical appearance mimicking the behaviour of a fish. To propel the drone, its tail waves back and forth just like that of a fish, and the underwater drone also controls its own buoyancy.
Inside the body of the fish, a motor pumps water back and forth in two balloon-like chambers; as one fills and pushes the tail to one side, actuators push water into the other chamber, then flexing the tail in the other direction.
The CSAIL team overcame the challenge of getting SoFi to swim in both shallow and deep water was approached by creating a “buoyancy control unit” that fills the role of a swim bladder in a fish by compressing and decompressing the air inside it. Fins on the side of the body adjust the vertical angle of the drone, guiding it up and down through the water.
It is also unique in aquatic drone design in that many existing drones, such as the underwater robot from PowerRay or the Aquabotix ROV, are deployed on a tether.
“The authors show a number of technical achievements in fabrication, powering, and water resistance that allow the robot to move underwater without a tether,” said Cecilia Laschi, professor of biorobotics at the Sant’Anna School of Advanced Studies in Pisa, Italy. “A robot like this can help explore the reef more closely than current robots, both because it can get closer more safely for the reef and because it can be better accepted by the marine species.”
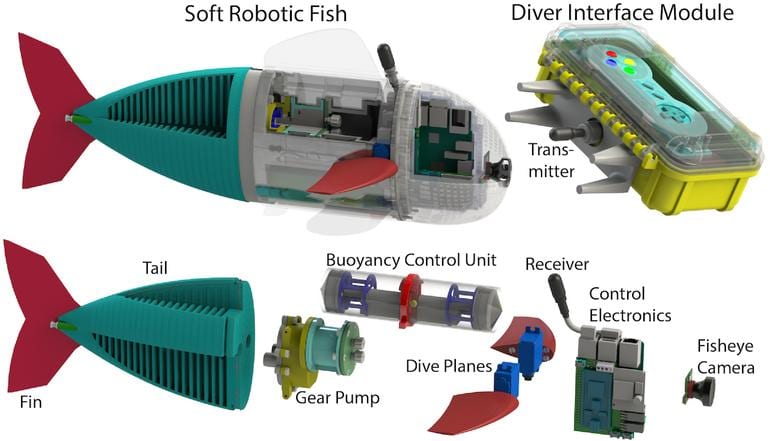
MIT’s SoFi Underwater Drone Fish – the lightweight setup includes a single camera, a motor, and the same lithium polymer battery that can be found in consumer smartphones | MIT CSAIL
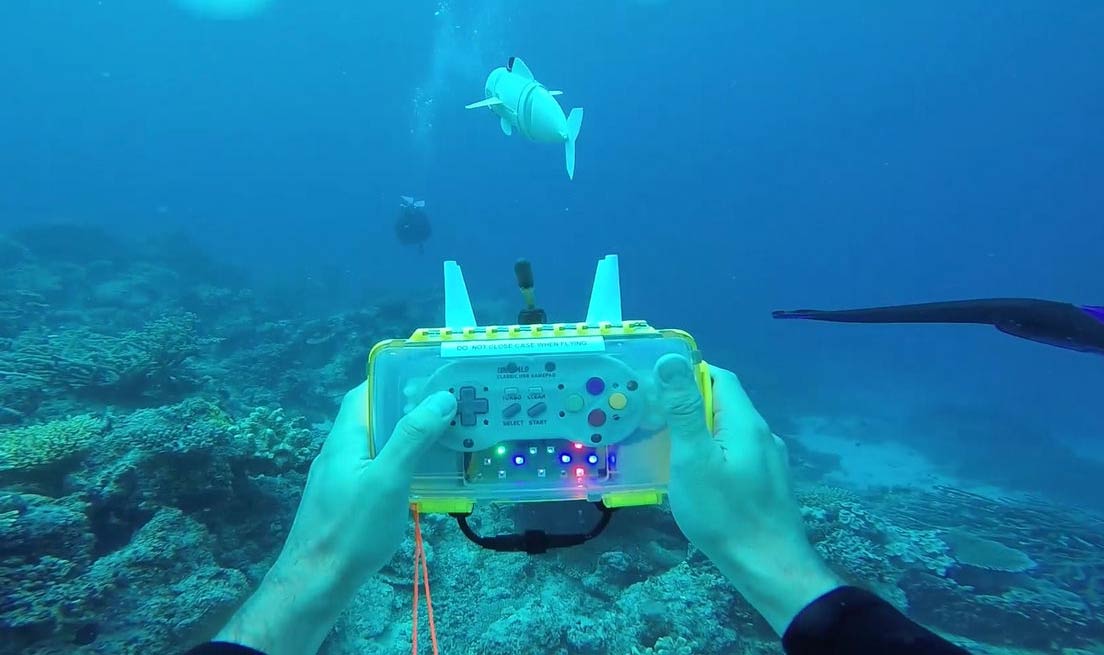
Test dives of SoFi were conducted on the Rainbow Reef in Fiji, and the scientists reported that it was adept at handling the ocean currents where it swam down over 50 feet for up to 40 minutes.
So far, SoFi can perform simple tasks like following fish and taking high-resolution photos or videos from – you guessed it – a fisheye lens located just in front of it’s dorsal fin. However at present the footage taken by the underwater robot is somewhat wobbly.
CSAIL see soft robotics as the future of drone and robotics development, as they are much less fragile than those made with hard plastics, and therefore developers do not need to concern themselves so much with collision avoidance technology (or the added weight and unnatural motion that goes with it).
“Collision avoidance often leads to inefficient motion, since the robot has to settle for a collision-free trajectory,” says Rus, the Andrew and Erna Viterbi Professor of Electrical Engineering and Computer Science at MIT. “In contrast, a soft robot is not just more likely to survive a collision, but could use it as information to inform a more efficient motion plan next time around.”
SoFi grew out of a soft robotic fish prototype created CSAIL Director Daniela Rus and graduate student Andrew Marchese in 2014. Daniela Rus collaborated on the current project with Katzschmann, graduate student Joseph DelPreto and former postdoc Robert MacCurdy, who is now an assistant professor at the University of Colorado at Boulder.
Perhaps some of the scientists from MIT used the wind-up fish as inspiration? One thing is for sure: things have come a long way forward since then! Here’s a dose of bathtime nostalgia, ocean-style:























