
AI
Detecting Pavement Cracks Using Drones and Neural Networking
Roads, just like every piece of infrastructure, are prone to wear out or damage over time. There are several different kinds of distresses or types of damage that can be caused to a road in a flexible pavement such as potholes, rutting, patches and cracking of the road structure. These distresses can aggravate over time and may require resource-expensive maintenance if not checked in time for the purpose of minimizing maintenance resources.
Traditional means of road inspection
Regular periodic inspection of roads is conducted in order to detect potential damage which is performed by specialists who can monitor the roads and infrastructure, acquire images, collect data and assess distresses. However, this traditional way of data collection has many drawbacks such as labor intensity, time consumption and safety hazards involved.
Autonomous distress data collection
Automatic distresses data collection using digital imaging technology has been used by researchers since more than 50 years, this method reduces disturbance to the public traffic and road hazard to human inspectors during the survey.
Crack extraction with drones using image processing and neural networks
An article in International Journal of Advanced Computer Science and Applications by the title of Automatic Pavement Cracks Detection using Image Processing Techniques and Neural Network not only explored different methodologies used for autonomous distress data collection, but also formulated an effective method for the analyses using drones.
The article is aimed at modeling a methodology by which object recognition is used to extract road cracks from airborne images acquired by drones.
The methodology was developed by following four steps that were followed sequentially for establishing the model or algorithms used for detecting cracks in a road by analyzing it with a UAV:
- Image enhancement and pre-processing
- Feature extraction
- Neural network modeling
- Validation process
The discrete steps used for the process are described as:
Image acquisition
- Due to their mobility and maneuverability, drones were used to acquire images of an inspection site.
- These images were then pre-processed after which they were runn through normalization function to average the intensity of the images.
- Following the normalization, the images were then converted to grayscale color grading for convenient separation of cracks from solid or smooth surfaces in an image.
- A Sobel filter was used for edges detection followed by Noise removal filter.
- Thresholding was then applied to the images to observe features.
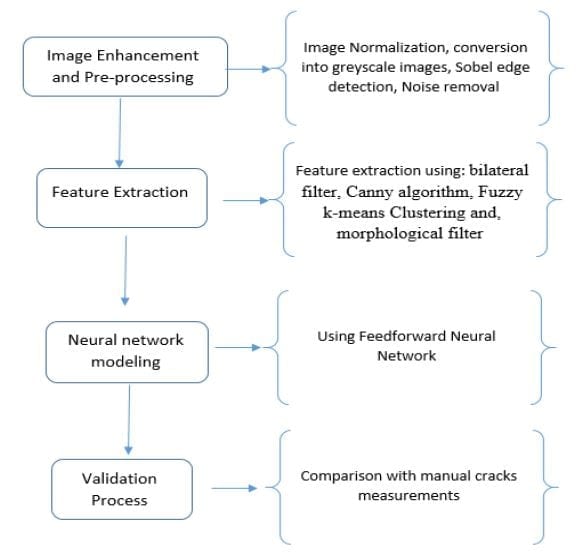
Flowchart Showing the Methodology Followed in Conducting the Study.

Database Sampling from Images Subsets.
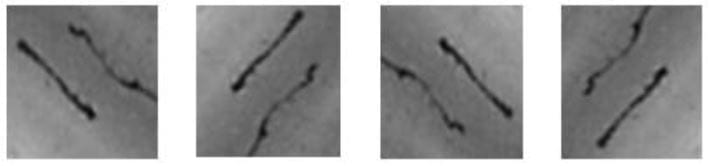
Cropped Image of the Same Crack Rotated to Provide Four Different Directions.
Feature extraction with image processing
After thresholding, the images are refined enough to be visually detected. However, the gray-level distribution of cracks is impossible to be separated from the gray-level distribution of the road pavement, therefore, image processing is required to support solving such problems.
A number of extraction methods were compared out of which the morphological filter ’closing’ -which is simply a dilation followed by an erosion filter- was selected as the most suitable method for the task. The reason for that is that this compound morphological operation showed the best results according to the minimum discrepancies between the actual and measured number of cracks and between the actual and measured length of cracks.
Artificial Neural Network (ANN)
The features extracted from the acquired images were then used for pattern analysis and classification as input to the ANN module. A Feed-forward Neural Network simulated the extracted patterns and features processed from the images.
Finally, these results in terms of the detected cracks and their measurements were compared to the cracks identified by traditional inspection techniques.
Database preparation
Sub-images were prepared from the captured aerial images that were extracted from both cracked surfaces as well as considerably smooth surfaces. The cropped images of the same crack were rotated to provide four more different directions for the ANN modeling.
ANN classified the images by dividing the data into three sets as follows:
- Training set: It contains 80 % of the total data which is used to build the model and determine the parameters.
- Validation data set: It is 10% of the data used for validating the performance of the network.
- Robustness data: The remaining 10% of the total data is used to increase the robustness of the model in the test phase.
Results
The system was found to be 87% precise or consistent and 82.5% accurate, implying that the system has minimal random error and aberrations in its performance, from the image acquisition with drones to the Neural Network processing.
The inaccuracies due to false positives are related to image noise and image interference.
Commenting on the potential future aspects of the methodology developed, the author writes, “We are looking forward to having hand-held cell phones applications of this technology on the smart phones themselves.”
Citation: Automatic Pavement Cracks Detection using Image Processing Techniques and Neural Network, International Journal of Advanced Computer Science and Applications 9(9) · January 2018, https://www.researchgate.net/publication/327983471_Automatic_Pavement_Cracks_Detection_using_Image_Processing_Techniques_and_Neural_Network


























