Industry
Using Drones for Sugarcane Agriculture
Drones have been used for data collection and analysis for better planning in agriculture and for crop management for some time now. In a recent study carried out by the Brazilian National Institute for Space Research–Remote Sensing Division at São José dos Campos in São Paulo, drones were used with the aim of the study was Identifying and monitoring factors that induce yield reduction in Sugarcane crop. Given that Sugarcane products contribute significantly to the Brazilian economy, generating U.S. $12.2 billion in revenue in 2018, it becomes imperative to resolve issues like weed (Bermuda grass) occurrence and other causes of yield reduction.
Study Premise
One way to effectively monitor weeds is using remote sensing data, especially those obtained by unmanned aerial vehicles (UAVs). These images are suitable for mapping areas where weeds have escaped control due to management errors or herbicide resistance. UAV images capture the spectral reflectance of vegetation and other objects from above, reducing the time required for and the number of field campaigns necessary to investigate weed occurrence.
The detection of Bermudagrass in sugarcane crops using remote sensing data, however, is a challenge considering their spectral similarity. The research team published a paper on the methods explored to overcome this limitation by optimising the potential of texture features derived from images acquired by an optical sensor onboard an unmanned aerial vehicle (UAV) to detect Bermuda grass in sugarcane.
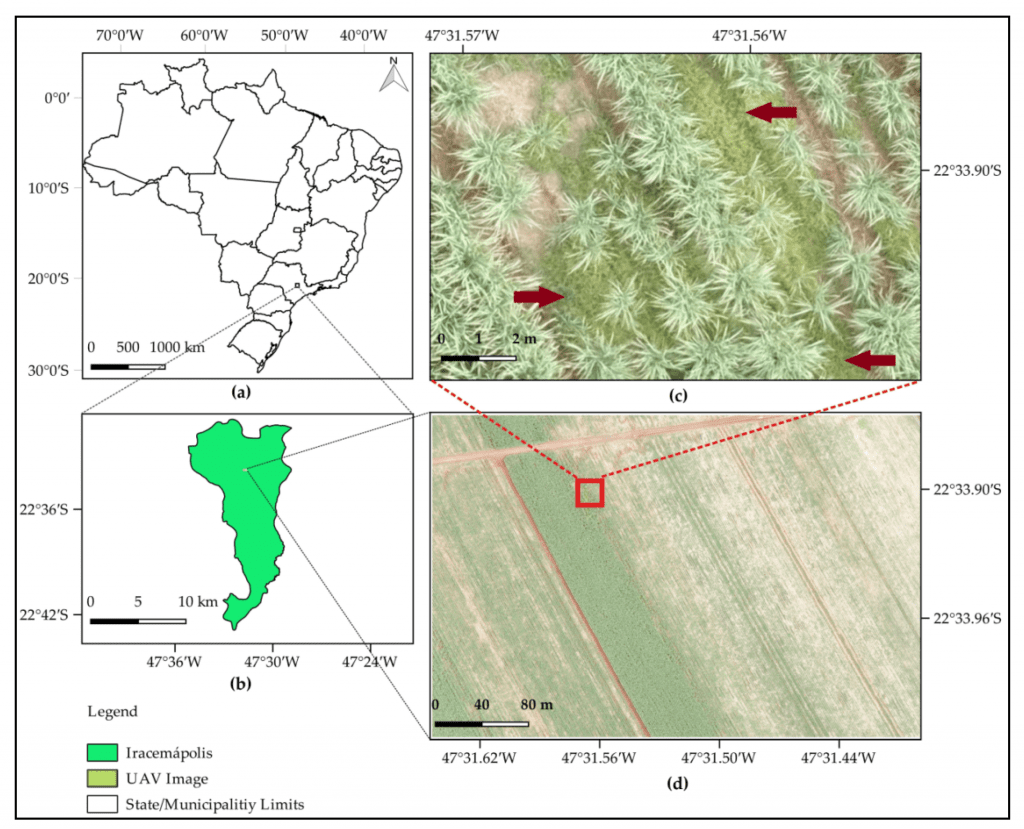
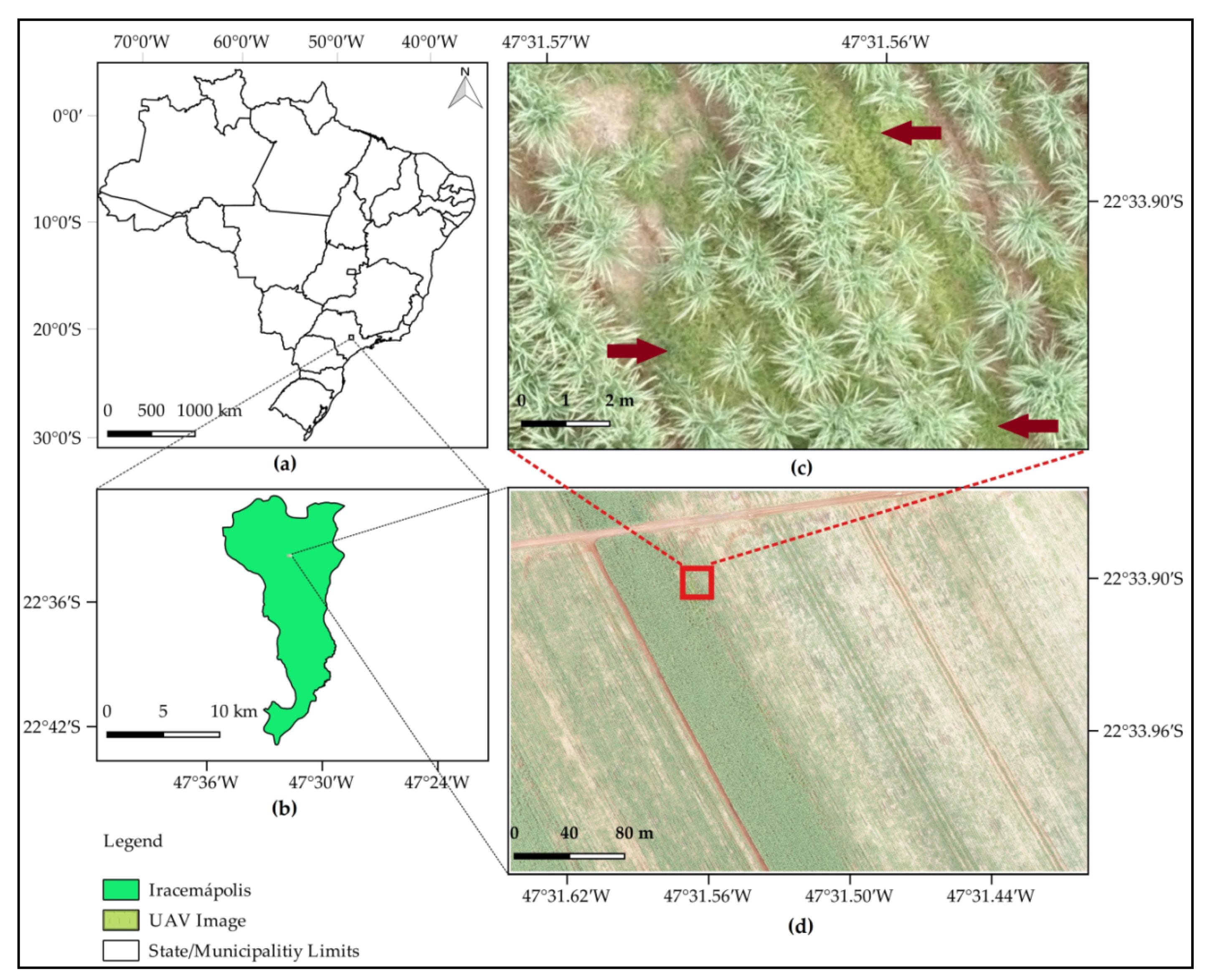
(a) Location of the study site in São Paulo State, Brazil; (b) Iracemápolis municipality and the location where the image was acquired; (c) zoom representing the infestation of Bermudagrass (highlighted with red arrows) in a sugarcane field (gramineous weed between and within crop rows); (d) red, green, and blue (RGB) unmanned aerial vehicle (UAV) image of true color composition and 2-cm spatial resolution.
UAV Based Research Method
The research team comprising Cesare Di Girolamo-Neto, Ieda Del’Arco Sanches, Alana Kasahara Neves, Victor Hugo Rohden Prudente, Thales Sehn Körting, Michelle Cristina Araujo Picoli and Luiz Eduardo Oliveira e Cruz de Aragão first employed airborne UAV sensors to spot object by distinguishing them with image processing techniques like specific reflectance characteristics for each wavelength of the electromagnetic spectrum. The spectral reflectance detected by each sensor’s channel (or band) is the baseline for applications involving weed mapping and airborne sensors. RGB UAV images have been used to map the level of infestation of Bermuda grass in vineyards.

(a) Octocopter GYRO 200 OCTA 355 UAV; (b) Sony RX100M3 camera of 20.1 megapixels.
The study site was in the Iracema Mill, located in São Paulo State, Brazil. The Iracema Mill has been manufacturing sugarcane products such as sugar and ethanol for over 70 years, processing an average of 3 million tons of prime mater per year in an area of 30,000 ha, spread across different municipalities of São Paulo State. Located in the Iracemápolis municipality the study site had 8,834 ha of planted crops, with sugarcane representing 95% of this area and being the most important source of income.
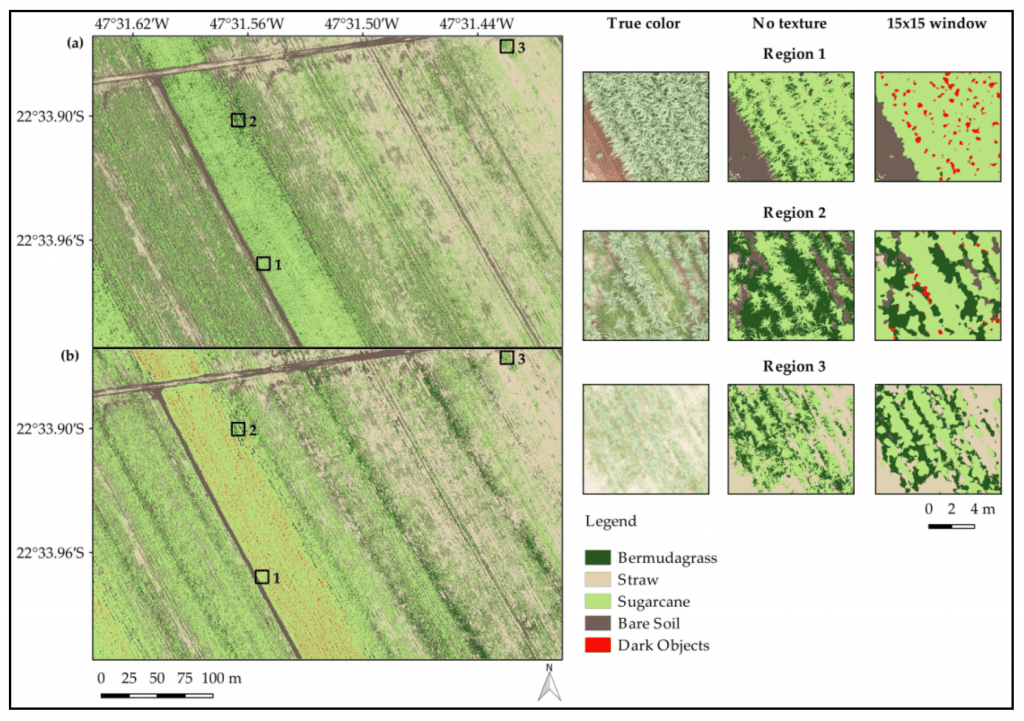
Images considering (a) the experiment without texture and (b) the experiment that used texture calculated from a 15 × 15 window. Three different regions were selected and zoomed in on for better visualization of the original RGB composition and the classification results for images (a) and (b).
Two flights were carried out in the study site at different times obtained 153 and 135 images, respectively. These flights were realized during their respective hours due to a cloud-free sky. All images were acquired with an overlap of 80% (longitudinal) and 60% (side), with a flight height of 80m. This configuration resulted in a pixel size of 2cm. After image acquisition, an orthomosaic was generated using Pix4D software. Furthermore, the image was cropped in order to avoid low overlapping areas on the borders, resulting in the image presented. Adding texture metrics to the classification process improved the overall accuracy from 83.00% to 92.54%, and this improvement was greater considering they represented a texture transition between two targets.
Results
The study concluded that Production losses induced by Bermuda grass presence reached 12.1 tons × ha−1 in the study site. This study not only demonstrated the capacity of UAV images to overcome the well-known limitation of detecting Bermuda grass in sugarcane crops, but also highlighted the importance of texture for high-accuracy quantification of weed invasion in sugarcane crops.
Conclusion
The research said that in their study, texture features from the gray-level co-occurrence matrix improved the classification accuracy of Bermuda grass in sugarcane crops using the random forest classifier. The overall accuracy for the experiment using only RGB band values and a vegetation index was 83.0%. When textures were added into this dataset, the overall accuracy increased up to 92.5%, a better result compared to other sugarcane weed detection studies. These results indicate that UAV images and texture features are a good combination to provide reliable detection of Bermuda grass on sugarcane crops in Brazil.
Citation: Assessment of Texture Features for Bermudagrass (Cynodon dactylon) Detection in Sugarcane Plantations
by Cesare Di Girolamo-Neto, Ieda Del’Arco Sanches, Alana Kasahara Neves, Victor Hugo Rohden Prudente, Thales Sehn Körting, Michelle Cristina Araujo Picoli and Luiz Eduardo Oliveira e Cruz de Aragão, Drones 2019, 3(2), 36; https://doi.org/10.3390/drones3020036 (registering DOI) – 13 April 2019, https://www.mdpi.com/2504-446X/3/2/36