Conservation
Low-Cost Autonomous Rubber Dinghy for Mapping and Monitoring Coral Reefs
Researchers are now exploring the use of recent advances in open source Global Positioning System (GPS)-guided drone technology to design and test a low-cost and transportable small unmanned surface vehicle (sUSV).
In the effort to design a more repeatable and consistent platform to collect data for Structure from Motion (SfM) monitoring of coral reefs and other benthic habitats a research team comprising George T. Raber and Steven R. Schill used an sUSV to create underwater high-resolution orthophoto mosaics and digital surface models. The images can be used to create SfM models that provide very detailed images and measurements that can be used to monitor changes in biodiversity, reef erosion/accretion, and assessing health conditions. The University of Southern Mississippi, School of Biological, Environmental, and Earth Sciences, Hattiesburg, USA and The Nature Conservancy, Caribbean Division, Coral Gables USA were main contributors to this survey. The research titled, “Reef Rover: A Low-Cost Small Autonomous Unmanned Surface Vehicle (USV) for Mapping and Monitoring Coral Reefs”, is published in the open access journal Drones.
The imaging system uses two cameras to collect stereo photos that can be later processed using photogrammetry software to create underwater high-resolution orthophoto mosaics and digital surface models.

The Reef Rover Version 1 being deployed near a coral reef at West Bay, Grand Cayman. The electronic components inside the Pelican case are highlighted in the inset image in the upper left of the figure. The camera is mounted inside the case using a tripod mount and faces downward looking through a clear acrylic glass panel (upper right inset).
Materials and Methods
Researchers designed the Reef Rover system keeping in mind multiple goals and practical restraints. The system needed to have a very low draft in order to avoid potential obstacles such as shallow coral heads or other features close to the water surface. It also needed to be sufficiently stable on water to avoid getting toppled by small waves and water-resistant to avoid damage to the electronic components. A target budget of approximately $3000 USD was set to make the system affordable for varying budgetary constraints.

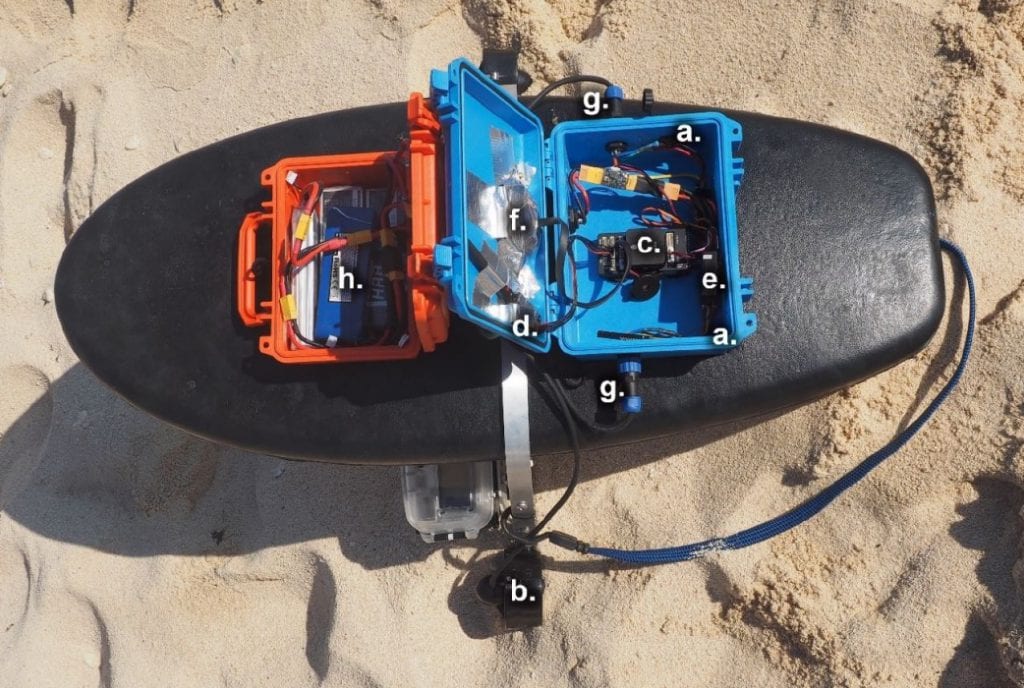
Fully assembled Reef Rover Version 2. The control unit is housed in the blue case and contains the autopilot, electronic speed controllers, radios, and Global Positioning System (GPS). The orange case contains the LiPo batteries that provide power to the control unit and electric motors. The following components are labelled in the lower image and detailed further in Table 1. (a) Blue Robotics electronic speed controllers (ESCs), (b) Blue Robotics T100 thrusters, (c) Pixhawk 1 flight controller, (d) Telemetry radio, (e) Radio and receiver for communicating with the remote controller (f) Ublox M8N GPS, (g) Waterproof panel plugs, and (h) 3 cell (11.1 volt), 5000 mAh LiPo batteries.

Reef Rover Version 2 showing two different camera systems. The upper right image shows the assembled system collecting data at the West Bay, Grand Cayman study site. The upper left image shows the system setup using four GoPro™ Hero 6 Black cameras. The lower images show the system setup using two Sony a6300 mirrorless cameras in underwater housings.
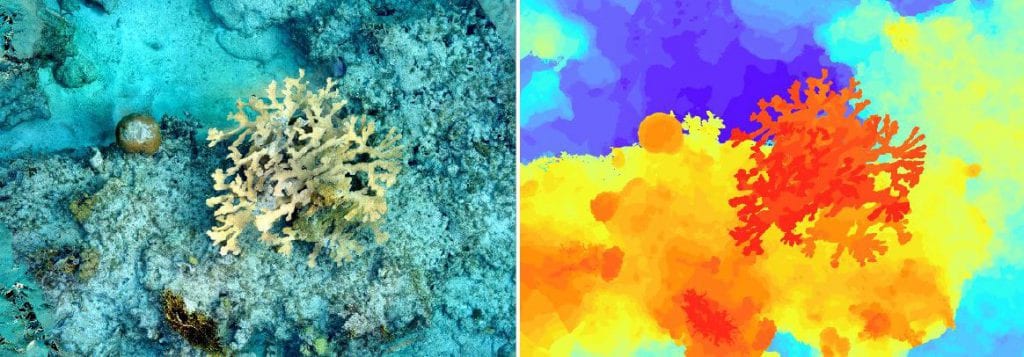
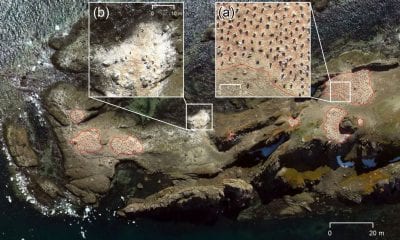
Several renderings of a Structure from Motion (SfM) model created using Reef Rover Version 1 centered over an Elkhorn Coral (Acropora palmata) colony located in West Bay, Grand Cayman with an average depth of 2–4 m. (a) The dense point cloud visualized from an angle. (b) The 3-D mesh from the same angle. (c) The 2-D orthophoto mosaic. (d) Rendering of the digital surface model (DSM).

Taking measurements of the corresponding coral head with a 150 cm PVC pipe marked with 30 cm increments and photographed from an aerial UAV.
Such systems are becoming common tools used in marine mapping and conservation efforts worldwide. Similar to a UAV mission, programmed “float line” missions are uploaded to the Pixhawk that provide navigation waypoints for the vehicle to travel back and forth over a specific reef area while taking stereo photos. Ground control software Mission Planner (for PCs) and the Tower app (for android tablets and phones) which are both free and open source were used to plan, upload, and execute reef mapping missions.
The fully assembled Boat Vehicle version 2 measured 95 cm × 66 cm at the widest point (motor to motor) and weighed approximately 5 kg without batteries, making it easier to set up and transport. In the final configuration, without the external GPS antenna, it sat 16 cm above the water line at its tallest point.
Conclusion
Results from this project suggest the sUSV provides a repeatable, viable, and low-cost (<$3000 USD) solution for acquiring images of benthic environments on a frequent basis from directly below the water surface can be used successfully for mapping and monitoring coral reefs.
These advances will provide a greater ability to map larger areas in a more consistent manner and permit resource managers to be able to monitor small changes in coral reef environments at an increased temporal scale.